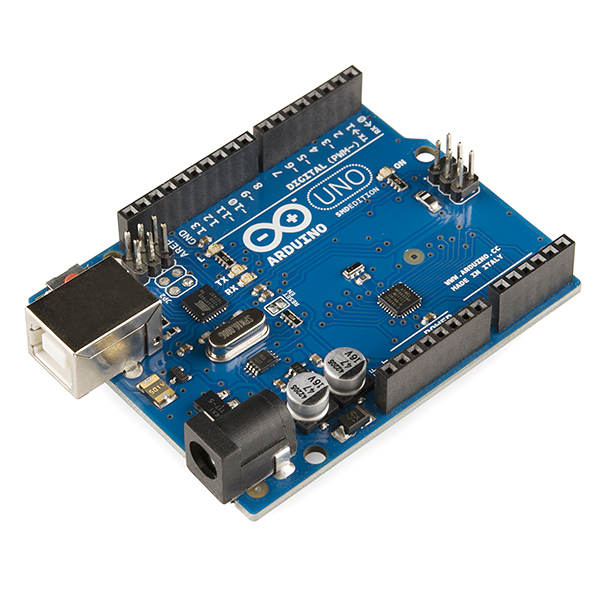
Arduino UNO
센서 신호를 읽고 시간 데이터를 컴퓨터로 보내는 보드.
Arduino UNO와 직접 제작한 적외선 포토게이트로 피켓펜스가 통과하는 시각을 기록하고, 위치-시간 자료에서 중력가속도 g를 구한다.
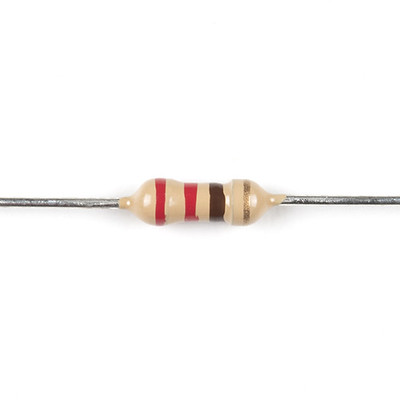
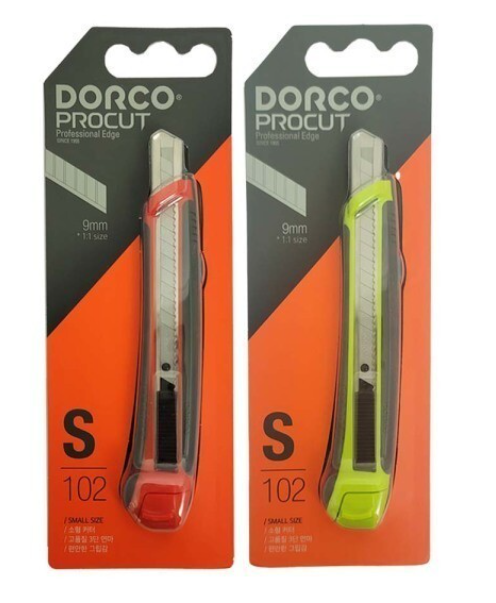
아래 사진을 보며 준비물을 먼저 확인한다. 이 실험에서는 적외선 송신기와 광 트랜지스터를 마주 보게 고정한 직접 제작 포토게이트로 피켓펜스가 지나가는 순간을 감지한다. 같은 기능의 부품이라도 제조사나 키트 구성에 따라 색, 모양, 크기가 조금 다를 수 있다.






| 분류 | 준비물 | 확인할 점 |
|---|---|---|
| 전자 부품 | Arduino UNO, USB 케이블, 브레드보드, 점퍼선, TSAL6100 적외선 송신기, SFH313FA 광 트랜지스터, 220Ω 저항, 10kΩ 저항 | 220Ω 저항은 적외선 송신기의 전류를 제한하고, 10kΩ 저항은 광 트랜지스터의 신호선을 5V 쪽으로 끌어올리기 위해 사용한다. |
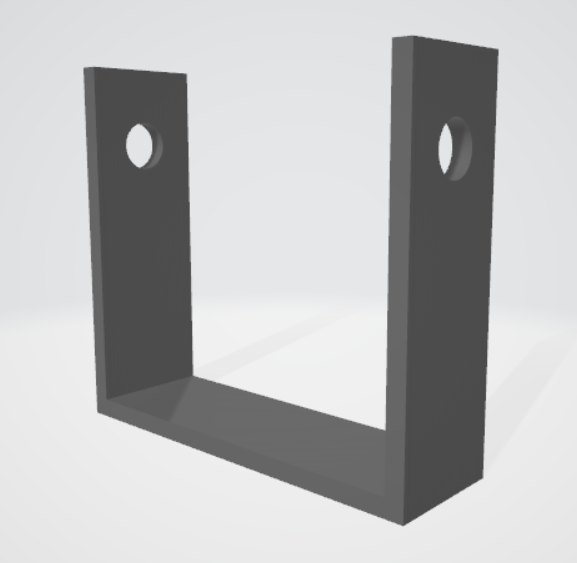
| 포토게이트 구조물 | LED 홀더 2개, 3D 프린팅 포토게이트 프레임 | 두 부품이 정확히 마주 보아야 한다. 피켓펜스가 지나갈 공간은 충분히 넓게 확보한다. |
| 피켓펜스 | 투명 플라스틱 판, 흑색 마스킹 테이프, 자, 커터칼 또는 가위 | 전체 길이가 약 30 cm라면 검은색 1.0 cm, 투명 1.0 cm 간격으로 만드는 것을 권장한다. |
| 분석 | Arduino IDE, 구글 스프레드시트 | 시리얼 모니터 결과를 CSV로 저장하고 그래프와 추세선을 만든다. |
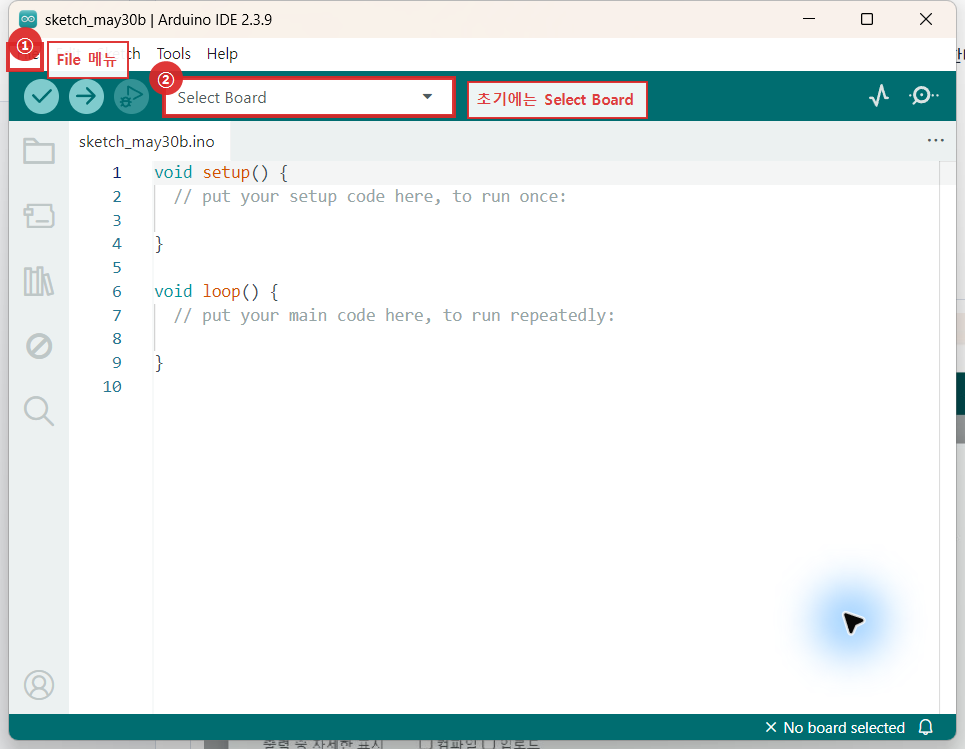
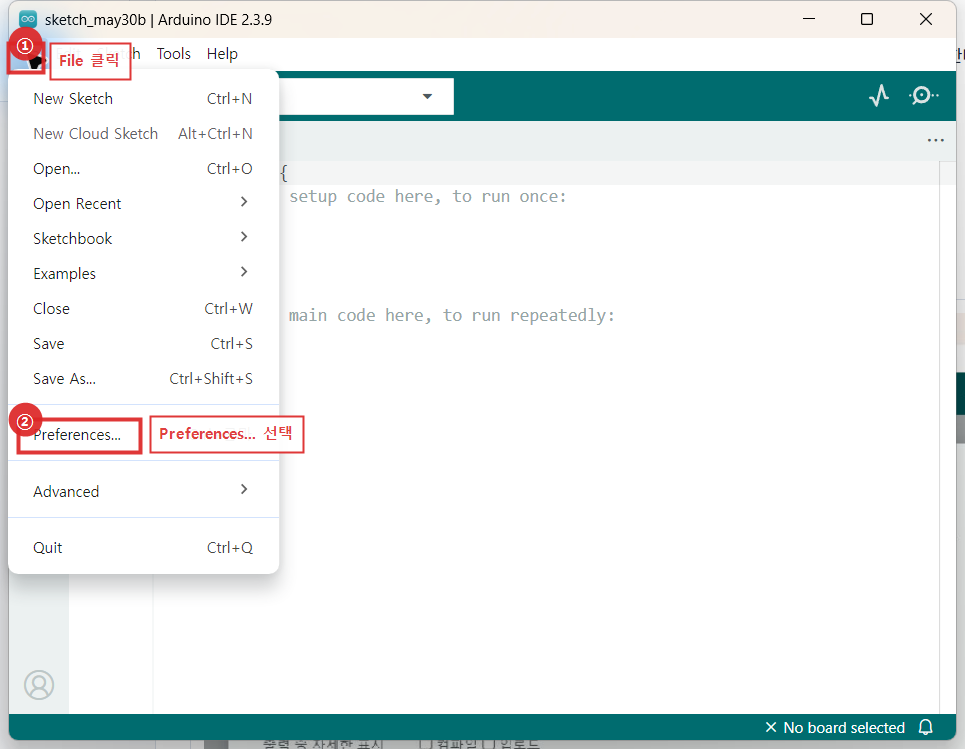
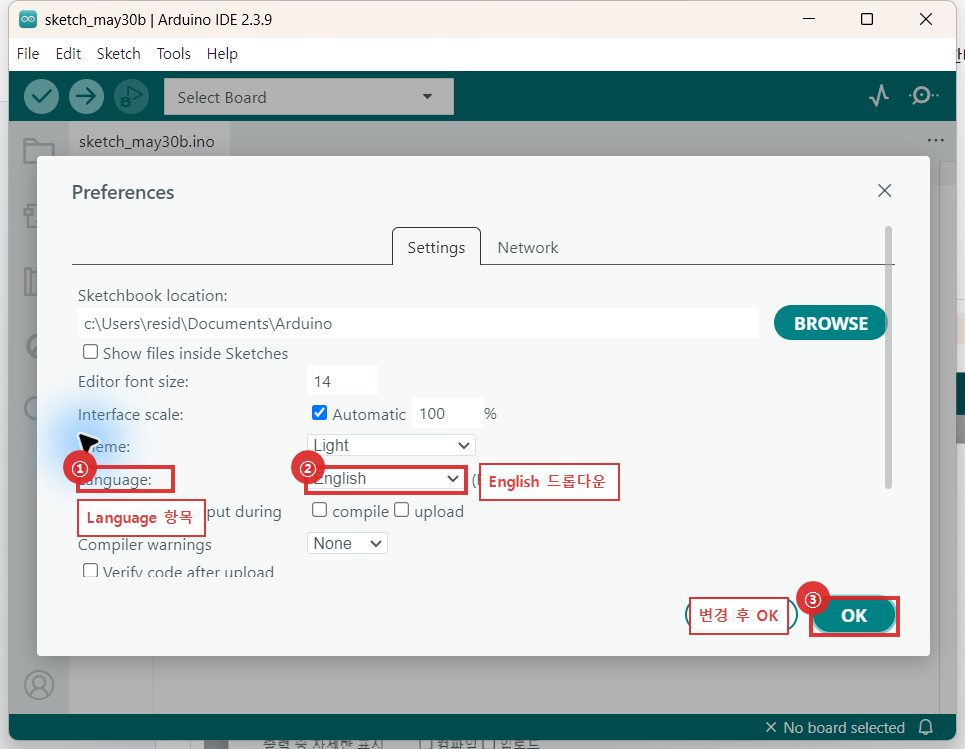
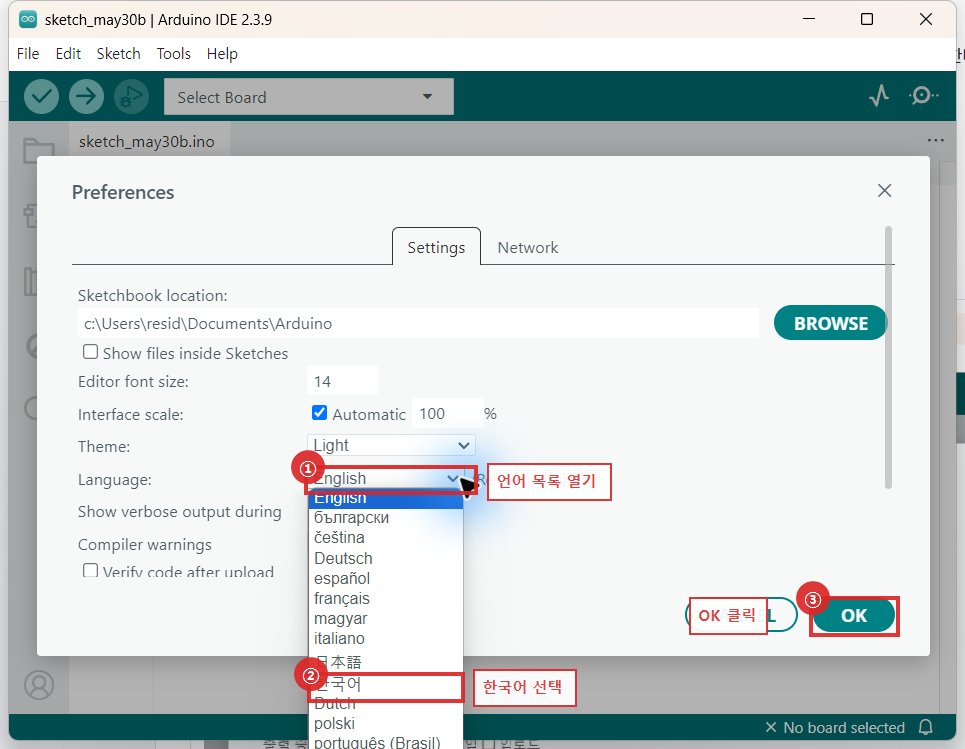
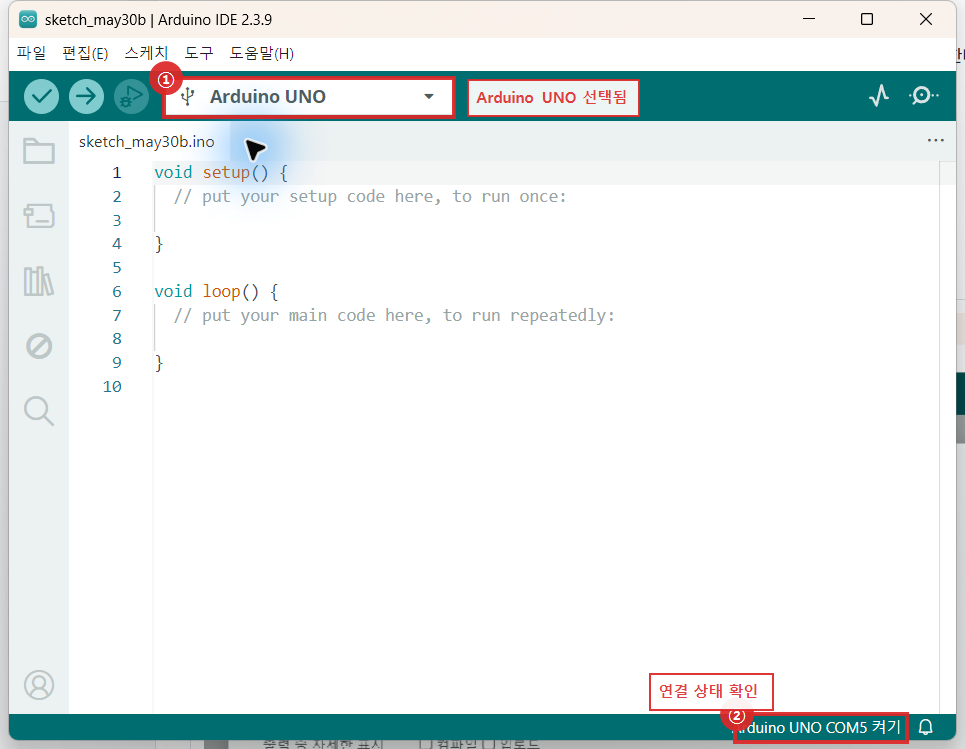
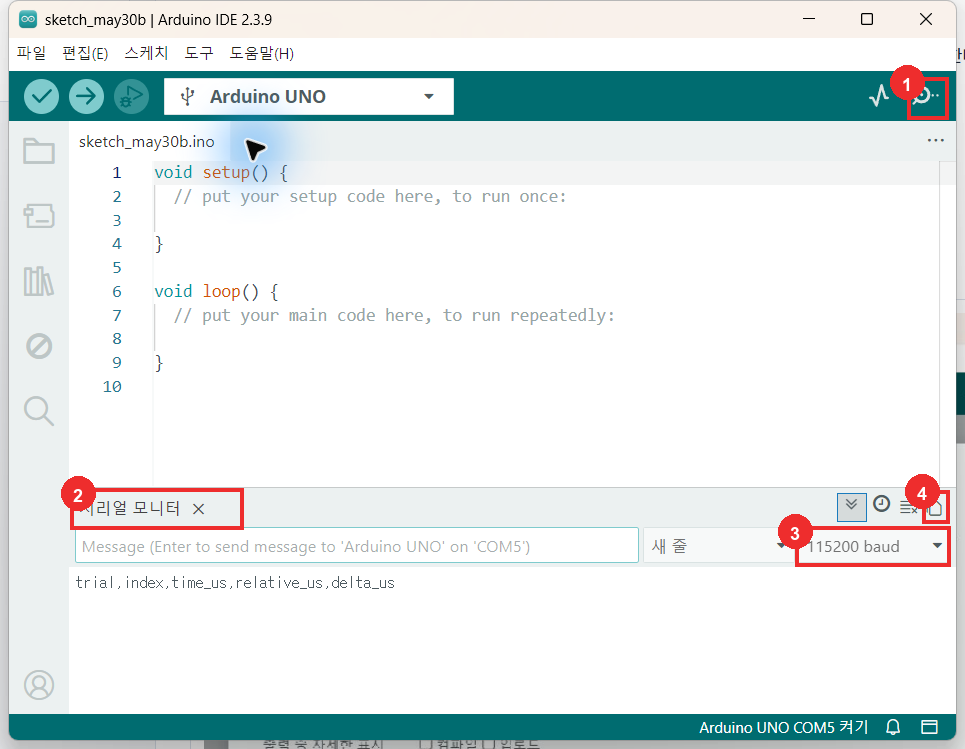
처음 설치한 Arduino IDE는 기본값이 영어이다. 따라서 한글 메뉴가 보이지 않는 것이 정상이며, 아래 순서대로 영어 메뉴에서 환경설정을 찾아 들어간다.
| 화면 위치 | 이름 | 이번 실험에서 하는 일 |
|---|---|---|
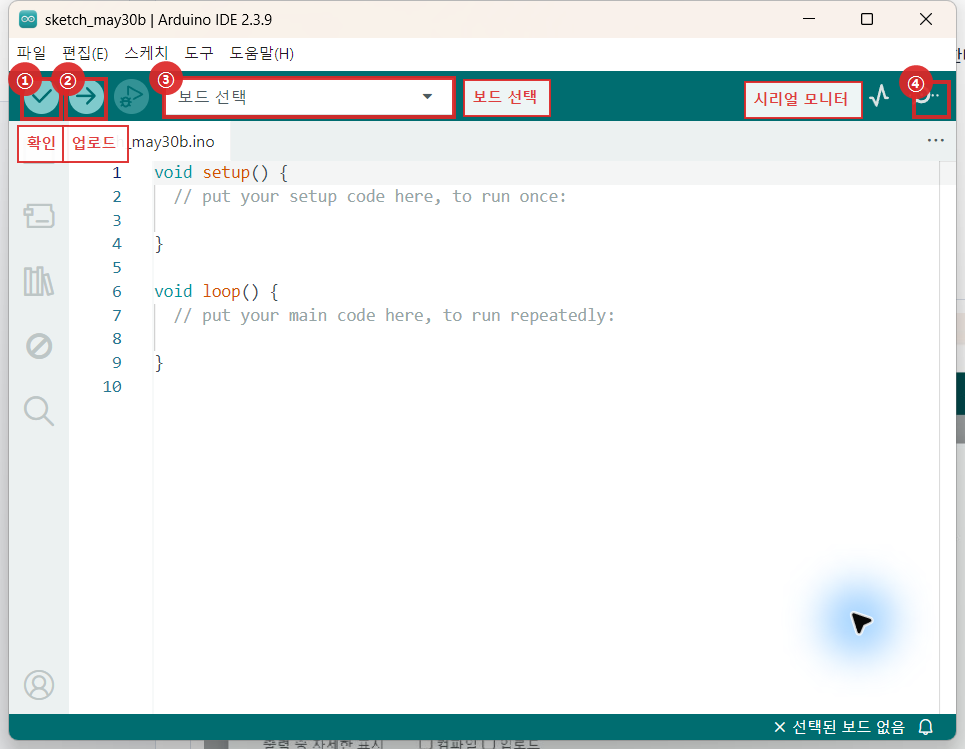
| 왼쪽 위 체크 표시 | 확인 | 코드에 문법 오류가 있는지 검사한다. |
| 왼쪽 위 오른쪽 화살표 | 업로드 | 작성한 코드를 Arduino UNO에 넣는다. |
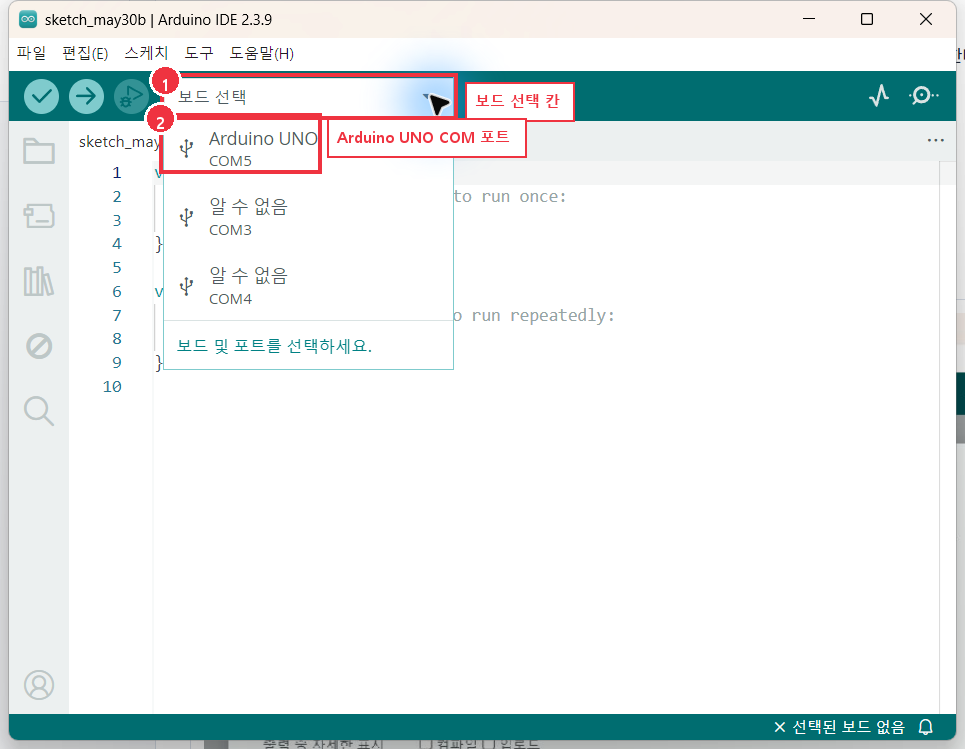
| 상단 보드 선택 칸 | 보드/포트 선택 | Arduino UNO와 연결 포트를 선택한다. |
| 가운데 흰색 영역 | 코드 편집기 | 실험 코드를 붙여 넣고 수정한다. |
| 오른쪽 위 돋보기 모양 | 시리얼 모니터 | 센서가 기록한 CSV 데이터를 확인한다. |
센서와 브레드보드를 연결하기 전에 Arduino UNO 보드만 먼저 확인한다. 이 단계에서는 USB 케이블만 연결하고, 다른 점퍼선이나 부품은 꽂지 않는다.
// Arduino UNO 보드 자체가 정상인지 확인하는 가장 간단한 테스트입니다.
// 아무 부품도 연결하지 않고 USB 케이블만 연결한 상태에서 실행합니다.
// LED_BUILTIN은 Arduino UNO 보드 위의 'L' LED와 연결된 내장 핀입니다.
void setup() {
// setup()은 보드가 켜지거나 리셋될 때 딱 한 번 실행됩니다.
// 내장 LED 핀을 OUTPUT으로 설정해야 Arduino가 LED를 켜고 끌 수 있습니다.
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
// loop()는 setup()이 끝난 뒤 계속 반복 실행됩니다.
// HIGH는 전압을 내보내라는 뜻이므로 내장 LED가 켜집니다.
digitalWrite(LED_BUILTIN, HIGH);
// 1000 ms = 1초 동안 기다립니다.
delay(1000);
// LOW는 전압을 내보내지 말라는 뜻이므로 내장 LED가 꺼집니다.
digitalWrite(LED_BUILTIN, LOW);
// 다시 1초 동안 기다린 뒤 loop()의 처음으로 돌아갑니다.
delay(1000);
}
내장 LED 테스트가 끝나면 같은 방법으로 이 문서의 센서 테스트 코드 또는 측정 코드를 다시 붙여 넣고 업로드한다.
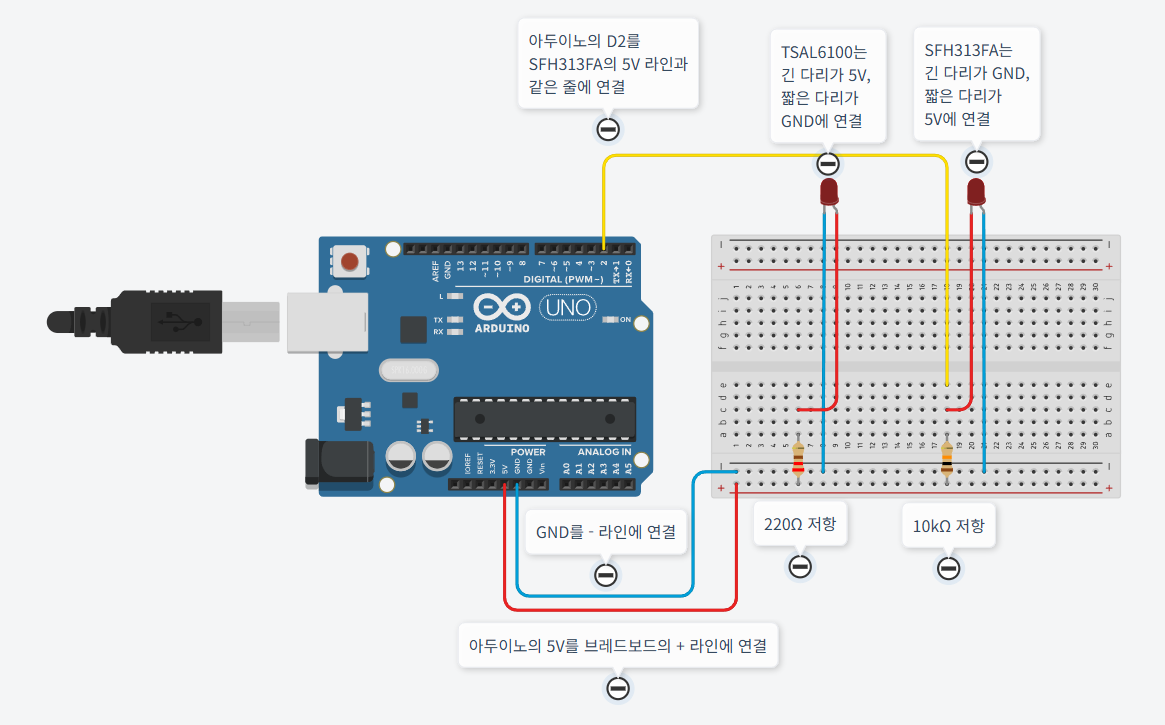
직접 제작한 포토게이트는 빛을 내는 TSAL6100 적외선 송신기와 빛을 감지하는 SFH313FA 광 트랜지스터를 서로 마주 보게 놓아 만든다. 두 부품은 모두 다리가 2개지만, 긴 다리와 짧은 다리가 맡는 역할이 서로 다르므로 먼저 방향을 확인한다.
| 부품 | 다리 구분 | 연결 | 주의 |
|---|---|---|---|
| TSAL6100 송신기 | 긴 다리 | +극 | 220Ω 저항을 거쳐 5V 쪽으로 이어지는 다리이다. |
| TSAL6100 송신기 | 짧은 다리 | -극 | GND 쪽으로 이어지는 다리이다. |
| SFH313FA 광 트랜지스터 | 긴 다리 | GND 쪽 다리 | GND 쪽으로 이어지는 다리이다. |
| SFH313FA 광 트랜지스터 | 짧은 다리 | 전원 쪽 다리 | 5V 쪽으로 이어지는 다리이다. |
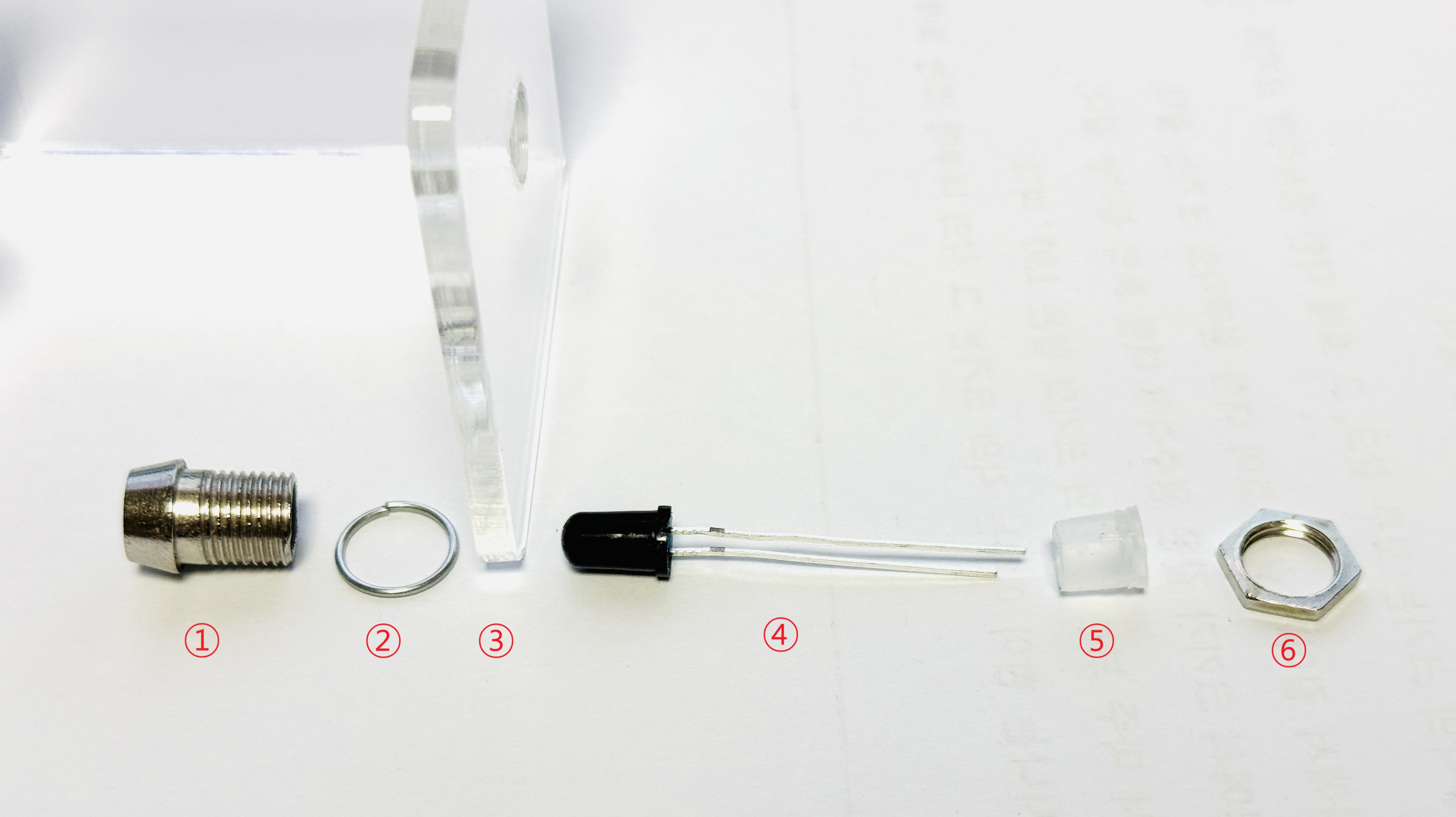
포토게이트는 LED 홀더 부품, 3D 프린팅 프레임, TSAL6100 또는 SFH313FA를 순서대로 끼워 만든다. 아래 사진의 번호를 보며 ①부터 ⑥까지 차례대로 조립한다. 같은 방법으로 한쪽에는 TSAL6100 송신기를, 반대쪽에는 SFH313FA 수신기를 끼운다.
| 번호 | 부품 | 조립 방법 |
|---|---|---|
| ① | LED 홀더 몸체 | 프레임의 안쪽에서 바깥쪽으로, 사진의 왼쪽부터 오른쪽 방향으로 구멍에 끼워 나사산이 바깥쪽으로 나올 수 있게 한다. |
| ② | LED 홀더 고정 링 | ① 다음에 ② 링을 끼워 홀더 몸체가 흔들리지 않게 한다. |
| ③ | 3D 프린팅 프레임 | 송신기와 수신기가 서로 마주 보도록 프레임 양쪽 구멍에 홀더를 하나씩 설치한다. |
| ④ | TSAL6100 또는 SFH313FA | ③ 프레임에 고정한 홀더 안쪽으로 ④ 부품을 넣는다. |
| ⑤ | LED 홀더 절연 캡 | ④ 부품 뒤쪽에 ⑤를 끼워 부품이 빠지지 않게 받쳐 준다. |
| ⑥ | LED 홀더 너트 | 마지막으로 ⑥ 너트를 돌려 끼워 홀더 전체를 단단히 고정한다. |
| 연결 대상 | 연결 위치 | 역할 |
|---|---|---|
| Arduino 5V | 브레드보드 아래쪽 +레일(5V) | 송신기와 10kΩ 풀업 저항에 전원을 공급한다. |
| Arduino GND | 브레드보드 아래쪽 -레일(GND) | 회로 전체의 기준 전압을 맞춘다. |
| Arduino D2 | SFH313FA의 짧은 다리, 10kΩ 저항, 노란색 신호선이 만나는 같은 줄 | 빛이 막혔는지 열렸는지 읽는다. |
| 220Ω 저항 | +레일(5V)과 TSAL6100 긴 다리 사이 | 적외선 송신기에 흐르는 전류를 제한한다. |
| 10kΩ 저항 | SFH313FA의 짧은 다리와 D2가 연결된 줄과 +레일(5V) 사이 | 빛이 막힐 때 D2가 HIGH로 안정적으로 올라가게 한다. |
220Ω 저항과 10kΩ 저항은 역할이 다르다. 220Ω 저항은 빛을 내는 송신기를 보호하기 위한 전류 제한 저항이고, 10kΩ 저항은 Arduino D2 입력값이 애매하게 흔들리지 않도록 5V 쪽으로 끌어올리는 풀업 저항이다.
Arduino 5V
├─ 220Ω 저항 ─ TSAL6100 긴 다리: 적외선 송신기 전원
└─ 10kΩ 저항 ─ SFH313FA 짧은 다리와 D2가 만나는 줄: D2를 HIGH로 끌어올림
SFH313FA 광 트랜지스터
├─ 짧은 다리: D2 신호선과 같은 줄, 10kΩ 저항을 거쳐 5V
└─ 긴 다리: GND
Arduino D2
└─ SFH313FA의 짧은 다리와 같은 줄에서 빛 차단 여부를 읽음송신기는 적외선을 계속 내보내야 하므로 5V에서 전류를 받아 GND로 흘려보낸다. 수신기인 광 트랜지스터도 5V와 GND를 기준으로 동작하면서 빛이 들어오는지에 따라 Arduino D2에서 읽는 전압을 바꾼다. 그래서 TSAL6100과 SFH313FA 모두 5V와 GND가 필요하지만, 송신기 쪽에는 220Ω 저항이, 수신기 쪽 D2 신호선에는 10kΩ 풀업 저항이 함께 사용된다.
피켓펜스를 떨어뜨리기 전에 검은색 테이프나 종이 조각으로 센서 틈을 막았다가 열면서 HIGH/LOW가 바뀌는지 확인한다.
Serial.begin(115200)과 같은 값이어야 한다.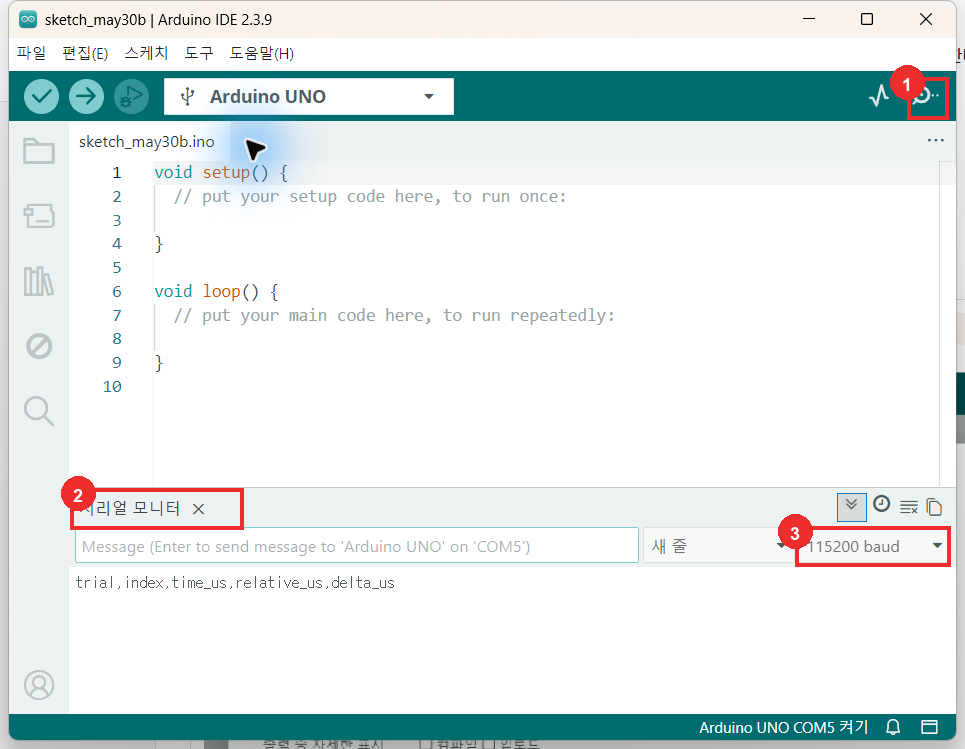
// 직접 제작한 포토게이트가 빛 차단을 감지하는지 확인하는 테스트 코드입니다.
// 배선도에서 노란색으로 표시된 신호선을 Arduino의 D2 핀에 연결했기 때문에 sensorPin을 2로 정합니다.
const int sensorPin = 2;
// 직전에 읽은 센서값을 저장합니다.
// 처음에는 아직 읽은 값이 없으므로 HIGH도 LOW도 아닌 -1로 시작합니다.
int lastState = -1;
void setup() {
// 시리얼 모니터와 Arduino가 115200 baud 속도로 통신하도록 시작합니다.
// 시리얼 모니터의 속도도 115200 baud로 맞춰야 글자가 제대로 보입니다.
// 뒤에서 사용할 실제 측정 코드도 115200 baud를 사용하므로 여기서부터 같은 속도로 연습합니다.
Serial.begin(115200);
// D2 핀을 입력으로 사용합니다.
// 이 핀으로 센서 출력값 HIGH 또는 LOW를 읽습니다.
pinMode(sensorPin, INPUT);
// 시리얼 모니터에 테스트 시작 안내 문장을 출력합니다.
Serial.println("Custom infrared photogate test");
Serial.println("빛길이 열려 있으면 보통 LOW, 막히면 HIGH입니다.");
}
void loop() {
// 현재 센서값을 읽습니다.
// 이 배선에서는 빛길이 열려 있으면 보통 LOW, 검은 종이나 테이프로 막으면 HIGH가 됩니다.
int state = digitalRead(sensorPin);
// 센서값이 이전과 달라졌을 때만 출력합니다.
// 이렇게 하면 같은 문장이 너무 많이 반복되어 올라오는 것을 막을 수 있습니다.
if (state != lastState) {
if (state == HIGH) {
Serial.println("HIGH: 빛길 차단");
} else {
Serial.println("LOW: 빛길 열림");
}
// 이번에 읽은 값을 다음 비교를 위해 저장합니다.
lastState = state;
}
// 너무 빠르게 반복하지 않도록 20 ms만 쉬어 갑니다.
delay(20);
}HIGH, 다시 열 때 LOW가 나오면 배선과 센서가 정상이다.HIGH가 나온다는 것은 실험에서 어떤 의미일까요?검은색 테이프가 포토게이트의 빛길을 막는 순간을 Arduino가 전압 변화로 구분할 수 있다는 뜻이다. 피켓펜스가 떨어질 때 검은색 경계가 지나갈 때마다 이런 변화가 생기고, Arduino는 그 순간의 시간을 기록한다.
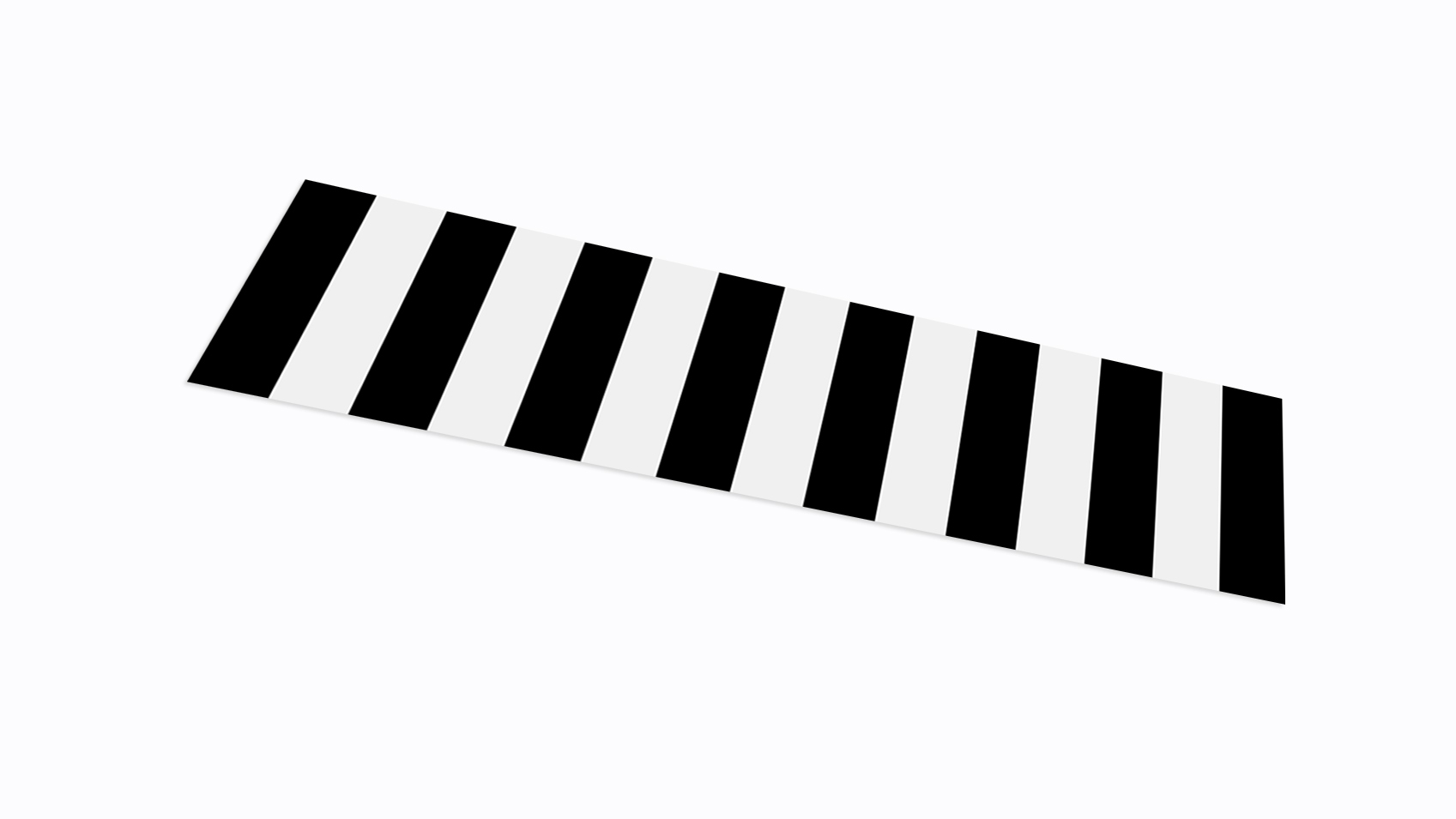
피켓펜스는 포토게이트의 빛을 막았다가 다시 열어 주는 자 역할을 한다. 검은색 테이프의 앞쪽 경계가 센서를 지나는 순간을 차례대로 기록하면, 각 경계 사이의 실제 거리를 알고 있으므로 시간-위치 데이터를 만들 수 있다.
전체 길이를 약 30 cm로 만들 때는 검은색 1.0 cm, 투명 1.0 cm를 기본 규격으로 추천한다. 이렇게 하면 같은 종류의 경계 사이 거리가 2.0 cm가 되어 약 15개의 측정 지점을 얻을 수 있다. 0.5 cm + 0.5 cm처럼 너무 촘촘하게 만들면 데이터 수는 늘어나지만, 테이프를 정확히 붙이기 어렵고 낙하 후반부에서 센서가 경계를 놓칠 가능성이 커진다.
| 구간 | 길이 | 의미 |
|---|---|---|
| 검은색 테이프 폭 | 1.0 cm = 10 mm | 센서 빛길을 차단하는 구간 |
| 투명 구간 폭 | 1.0 cm = 10 mm | 센서 빛길이 열리는 구간 |
| 같은 종류의 경계 사이 거리 | 2.0 cm = 0.020 m | 분석에서 사용하는 위치 간격 |
센서는 검은색 테이프의 같은 종류의 경계가 지나가는 순간을 차례로 기록한다. 한 검은색 테이프의 앞쪽 경계에서 다음 검은색 테이프의 앞쪽 경계까지는 검은색 1.0 cm와 투명 1.0 cm를 합친 거리이므로 2.0 cm이다. 그래서 위치 간격 d는 0.020 m로 입력한다.
아래 코드는 피켓펜스를 포토게이트 위쪽에서 바로 떨어뜨리는 방식으로 사용한다. 빛길이 열려 있다가 첫 검은색 칸이 들어오는 순간을 index = 0으로 기록하고, 이후 검은색 칸이 들어오는 순간을 차례대로 기록한다.
// 피켓펜스가 포토게이트를 지나갈 때의 시간을 CSV 형식으로 기록하는 코드입니다.
// 피켓펜스를 센서에 미리 끼워 두지 않고, 포토게이트 위쪽에서 바로 떨어뜨립니다.
// 빛길이 열려 있다가 첫 검은색 칸이 들어오는 순간을 index 0으로 기록합니다.
// 배선도에서 노란색으로 표시된 신호선이 Arduino D2에 연결되어 있으므로 2번 핀을 읽습니다.
const int sensorPin = 2;
// 이번 실험에서는 총 10번 떨어뜨릴 예정입니다.
const int maxTrials = 10;
// 피켓펜스의 경계가 아주 많이 감지되어도 한 번의 낙하에서 40개까지만 기록합니다.
// 실수로 손으로 센서를 계속 막았다 열 때 데이터가 끝없이 길어지는 것을 막기 위한 제한입니다.
const int maxEventsPerTrial = 40;
// 센서 신호가 아주 짧게 흔들릴 때 중복 기록되는 것을 막는 시간입니다.
// 1000 μs = 1 ms보다 짧은 간격의 변화는 같은 사건으로 보고 무시합니다.
const unsigned long debounceUs = 1000;
// 한 trial이 끝났다고 판단하는 기준 시간입니다.
// 마지막 경계가 지나간 뒤 300000 μs = 300 ms 동안 새 경계가 없으면 다음 낙하를 기다립니다.
const unsigned long trialEndGapUs = 300000;
// 현재 몇 번째 낙하 실험인지 저장합니다.
int trial = 1;
// 한 trial 안에서 몇 번째 경계가 지나갔는지 저장합니다.
int eventIndex = 0;
// 지금 피켓펜스가 지나가는 중이면 true, 기다리는 중이면 false입니다.
bool recording = false;
// 직전에 읽은 센서값입니다. HIGH/LOW 변화 순간을 찾는 데 사용합니다.
int lastState;
// 한 trial의 첫 번째 기록 경계가 지나간 절대 시각입니다.
unsigned long trialStartTime = 0;
// 가장 최근에 기록된 경계가 지나간 절대 시각입니다.
unsigned long lastEventTime = 0;
void setup() {
// 시리얼 모니터와 Arduino가 빠르게 통신하도록 115200 baud로 시작합니다.
// 시리얼 모니터에서도 반드시 115200 baud를 선택해야 합니다.
Serial.begin(115200);
// 센서 출력이 들어오는 D2 핀을 입력으로 설정합니다.
pinMode(sensorPin, INPUT);
// 시작 순간의 센서 상태를 먼저 저장합니다.
// 그래야 첫 loop()에서 이전 상태와 현재 상태를 비교할 수 있습니다.
lastState = digitalRead(sensorPin);
// #으로 시작하는 줄은 사람에게 보여 주는 안내문입니다.
// 원자료 시트에는 전체 출력을 붙여 넣고, 정제 공식이 안내문과 열 이름을 제외하게 합니다.
Serial.println("# trial 1: 피켓펜스를 포토게이트 위쪽에서 떨어뜨리세요.");
// 스프레드시트에 붙여 넣기 쉽도록 열 이름을 출력합니다.
Serial.println("trial,index,time_us,relative_us,delta_us");
}
void loop() {
// 시리얼 모니터 입력창에 r 또는 R을 보내면 처음부터 다시 측정할 수 있습니다.
// 이 처리를 맨 앞에 두어야 10번 측정이 끝난 뒤에도 초기화가 됩니다.
handleSerialCommand();
// 정해진 횟수만큼 실험이 끝나면 더 이상 기록하지 않습니다.
if (trial > maxTrials) {
return;
}
// 현재 센서 상태와 현재 시간을 읽습니다.
// micros()는 Arduino가 켜진 뒤 지난 시간을 마이크로초(μs) 단위로 돌려줍니다.
int state = digitalRead(sensorPin);
unsigned long now = micros();
// 직전에는 빛길이 열려 있었고(LOW), 지금은 막혔다면(HIGH)
// 검은색 테이프의 앞쪽 경계가 센서를 지나간 순간으로 봅니다.
// 첫 번째로 감지된 검은색 칸이 바로 index 0이 됩니다.
if (lastState == LOW && state == HIGH) {
// 너무 짧은 시간 안에 반복된 신호는 흔들림으로 보고 기록하지 않습니다.
if (!recording || now - lastEventTime > debounceUs) {
recordEvent(now);
}
}
// 다음 loop()에서 비교할 수 있도록 현재 상태를 저장합니다.
lastState = state;
// 기록 중인데 오랫동안 새 경계가 들어오지 않으면 한 번의 낙하가 끝난 것입니다.
if (recording && (now - lastEventTime > trialEndGapUs)) {
endTrial();
}
}
void handleSerialCommand() {
// 시리얼 모니터 입력창에 r 또는 R을 보내면 처음부터 다시 측정할 수 있습니다.
if (Serial.available() > 0) {
char c = Serial.read();
if (c == 'r' || c == 'R') {
resetAll();
}
}
}
void recordEvent(unsigned long now) {
// 아직 기록 중이 아니었다면, 이번 경계가 새 trial의 첫 번째 기록 경계입니다.
if (!recording) {
recording = true;
eventIndex = 0;
trialStartTime = now;
}
// 한 trial에서 너무 많은 사건이 들어오면 더 이상 기록하지 않습니다.
if (eventIndex >= maxEventsPerTrial) {
return;
}
// 첫 번째 기록 경계가 지난 시각을 0으로 놓고, 그 뒤로 지난 시간을 계산합니다.
unsigned long relativeTime = now - trialStartTime;
// 바로 이전 기록 경계와 이번 기록 경계 사이의 시간 간격입니다.
// 첫 번째 기록 경계는 이전 기록 경계가 없으므로 0으로 기록합니다.
unsigned long deltaTime = (eventIndex == 0) ? 0 : now - lastEventTime;
// 한 줄을 CSV 형식으로 출력합니다.
// 쉼표로 구분되어 있으므로 스프레드시트에 붙여 넣기 쉽습니다.
Serial.print(trial);
Serial.print(",");
Serial.print(eventIndex);
Serial.print(",");
Serial.print(now);
Serial.print(",");
Serial.print(relativeTime);
Serial.print(",");
Serial.println(deltaTime);
// 다음 경계를 위해 번호와 시간을 갱신합니다.
eventIndex++;
lastEventTime = now;
}
void endTrial() {
// 현재 trial을 끝내고 다음 낙하를 기다리는 상태로 돌아갑니다.
recording = false;
eventIndex = 0;
trial++;
if (trial <= maxTrials) {
Serial.print("# trial ");
Serial.print(trial);
Serial.println(": 피켓펜스를 포토게이트 위쪽에서 떨어뜨리세요.");
} else {
Serial.println("# 모든 trial이 끝났습니다. 다시 시작하려면 r을 입력하세요.");
}
}
void resetAll() {
// 시리얼 모니터에서 r을 보냈을 때 모든 값을 처음 상태로 되돌립니다.
trial = 1;
eventIndex = 0;
recording = false;
trialStartTime = 0;
lastEventTime = 0;
lastState = digitalRead(sensorPin);
// 새로 복사해도 표 형태를 알 수 있도록 열 이름을 다시 출력합니다.
Serial.println("# 다시 시작합니다. trial 1: 피켓펜스를 포토게이트 위쪽에서 떨어뜨리세요.");
Serial.println("trial,index,time_us,relative_us,delta_us");
}index 0은 무엇을 뜻할까요?index 0은 피켓펜스를 떨어뜨린 뒤 포토게이트가 처음으로 검은색 칸을 감지한 순간이다. 이 순간을 시간 t = 0의 기준으로 삼고, 이후 검은색 칸이 들어올 때마다 index 1, index 2처럼 번호가 하나씩 증가한다. 각 번호 차이는 피켓펜스의 일정한 간격, 즉 이 실험에서는 2.0 cm의 위치 차이에 해당한다.
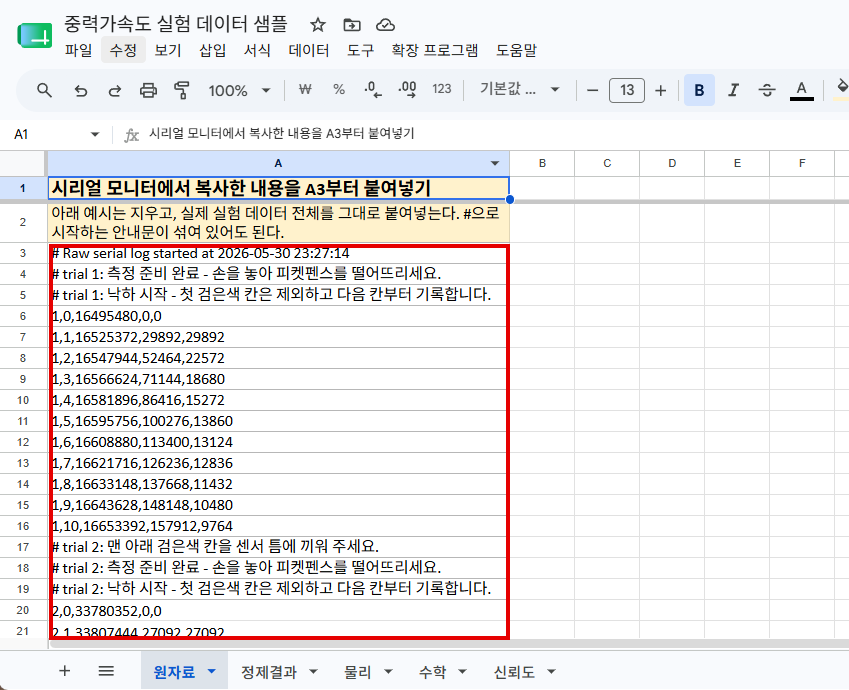
시리얼 모니터에서 복사한 내용에는 실제 측정값뿐 아니라 # trial 1: 피켓펜스를 포토게이트 위쪽에서 떨어뜨리세요. 같은 안내문도 함께 들어 있다. 이 장에서는 안내문을 제거하고, 쉼표로 이어진 원자료를 계산 가능한 숫자 표로 바꾼다.
구글 클래스룸 과제에 첨부된 중력가속도 실험 데이터 정제 양식을 확인하고, 학생별로 제공된 자신의 사본에서 작업한다.
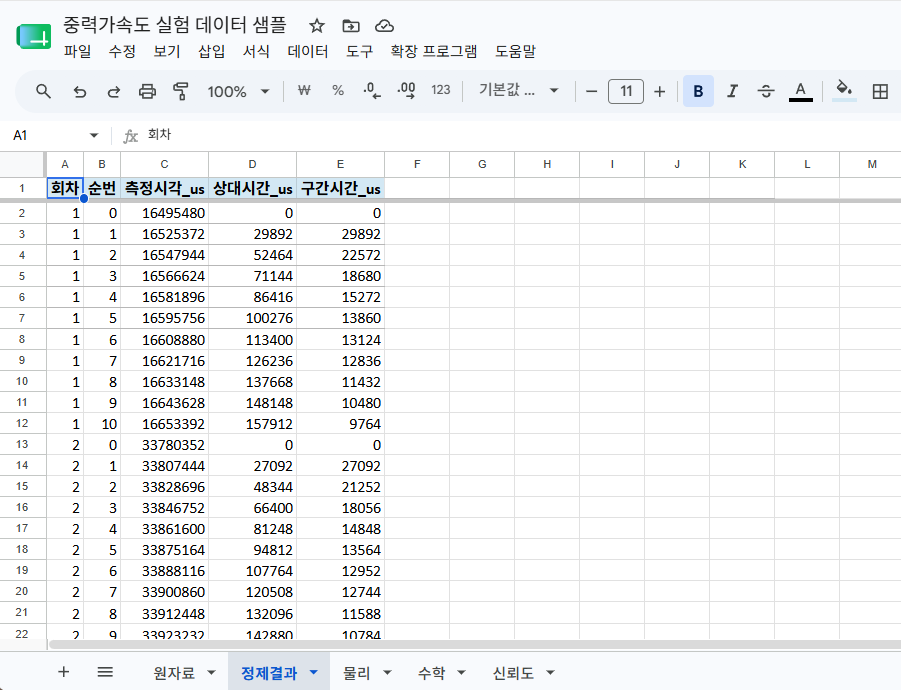
정제결과 시트의 A:E 열은 원자료 시트에서 숫자 데이터만 골라 자동으로 정리한다. 이 시트는 원자료를 정제하는 역할만 맡는다. 시간, 위치, 시간제곱, 속도, 회귀선 같은 분석용 계산은 뒤의 물리 시트와 수학 시트에서 따로 수행한다.
| 영역 | 의미 |
|---|---|
| 정제결과 탭 | 원자료를 분석 가능한 숫자 표로 바꾼 결과를 확인한다. |
| A:E 열 | 회차, 순번, 측정시각_μs, 상대시간_μs, 구간시간_μs만 남긴 정제 데이터이다. |
| 물리·수학 시트 | 정제결과의 A:E 열을 바탕으로 물리량 계산과 회귀분석을 각각 수행한다. |
정제결과 시트의 A2 셀에는 다음 공식이 들어 있다. 지워졌다면 A2에 다시 입력한다.
=ARRAYFORMULA(VALUE(SPLIT(FILTER('원자료'!A:A,REGEXMATCH('원자료'!A:A,"^[0-9]+,[0-9]+,[0-9]+,[0-9]+,[0-9]+$")),",")))| 부분 | 역할 |
|---|---|
REGEXMATCH(...) | 쉼표로 구분된 숫자 5개로 이루어진 줄만 찾는다. #으로 시작하는 안내문은 제외된다. |
FILTER(...) | 조건에 맞는 측정 데이터 줄만 가져온다. |
SPLIT(...,",") | 한 줄의 CSV 데이터를 쉼표 기준으로 5개 열로 나눈다. |
VALUE(...) | 문자로 들어온 숫자를 계산 가능한 숫자값으로 바꾼다. |
ARRAYFORMULA(...) | 여러 줄의 데이터를 한 번에 처리한다. |
정제 공식은 쉼표로 구분된 숫자 5개로 이루어진 줄만 골라낸다. #으로 시작하는 안내문이나 사람이 읽는 설명 줄은 이 조건에 맞지 않으므로 제외된다. 그래서 원자료에는 전체 출력을 그대로 붙여 넣고, 정제결과에서 분석 가능한 숫자 줄만 확인하면 된다.
이 장에서는 계산 방법보다 먼저 “왜 물체가 떨어지는가”를 물리 이론으로 정리한다. 출발점은 뉴턴의 만유인력 법칙이다. 그다음 지표면 근처에서 중력가속도 g를 거의 일정한 값으로 보고, 등가속도 운동과 역학적 에너지 보존을 이용해 실험 데이터에서 g를 추론한다.
지구와 물체 사이에는 서로 끌어당기는 힘이 작용한다. 이 힘을 중력이라고 하고, 뉴턴의 만유인력 법칙은 두 물체 사이의 중력 크기를 다음과 같이 나타낸다.
| 기호 | 뜻 | 이번 실험에서의 의미 |
|---|---|---|
G | 만유인력 상수 | 자연에 정해진 상수이다. |
M | 지구의 질량 | 실험 중 변하지 않는다. |
m | 떨어지는 물체의 질량 | 피켓펜스의 질량이다. |
r | 지구 중심에서 물체까지의 거리 | 교실 안 낙하 높이는 지구 반지름에 비해 매우 작으므로 거의 일정하다고 본다. |
물체에 작용하는 중력은 동시에
여기서 중요한 점은 m이 약분된다는 것이다. 공기저항이 작고 다른 힘이 무시된다면, 무거운 물체와 가벼운 물체는 같은 위치에서 같은 중력가속도를 가진다. 이 실험은 지구의 질량을 직접 구하는 실험은 아니지만, 지표면 근처에서 거의 일정하게 작용하는 g를 낙하 운동으로 측정하는 실험이다.
교실에서 피켓펜스가 떨어지는 높이는 지구 반지름에 비해 매우 작다. 그래서 낙하하는 동안 g가 거의 변하지 않는다고 보고, 피켓펜스를 등가속도 운동을 하는 물체로 해석할 수 있다.
| 해석 관점 | 출발 이론 | 기본식 | 실험에서 확인하는 방법 |
|---|---|---|---|
| 등가속도 운동 | 가속도 g가 거의 일정하면 속도는 시간에 따라 일정하게 증가한다. |
시간-속도 그래프를 그렸을 때 직선에 가까운지 보고, 그 기울기를 g로 해석한다. |
|
| 역학적 에너지 보존 | 공기저항과 충돌이 작으면 위치에너지 감소가 운동에너지 증가로 바뀐다. | 위치-속도제곱 그래프를 그렸을 때 직선에 가까운지 보고, 그 기울기의 절반을 g로 해석한다. |
에너지 식에서 물체가 정지 상태에서 출발한다고 보면 mgh = 1/2 mv²이고, 질량 m은 양쪽에서 약분된다. 따라서
물리 계산에서는 숫자만 맞아도 단위가 틀리면 결과가 완전히 달라진다. 이 가이드에서는 모든 계산을 SI 단위로 통일한다. 즉 시간은 초(s), 길이는 미터(m), 속도는 m/s, 가속도는 m/s²로 계산한다.
| 원래 값 | 시트에서 사용할 값 | 변환 방법 | 예시 |
|---|---|---|---|
정제결과의 상대시간_μs | 시간_s | 마이크로초를 초로 바꾼다. | 27292 μs = 0.027292 s |
검정+투명 간격 d | 피켓펜스 간격_m | 센티미터를 미터로 바꾼다. | 2.0 cm = 0.020 m |
| 위치 차이 / 시간 차이 | 구간 속도_m/s | m를 s로 나눈다. | 0.020 m / 0.020 s = 1.0 m/s |
| 속도의 제곱 | 속도제곱_m^2/s^2 | m/s를 제곱한다. | (1.0 m/s)^2 = 1.0 m²/s² |
2가 아니라 0.020으로 입력해야 하는 이유는 무엇일까요?물리 계산에서는 길이를 미터 단위로 통일한다. 2라고 입력하면 2 cm가 아니라 2 m로 계산되어 위치, 속도, g값이 모두 100배 크게 해석된다. 검은색 1.0 cm와 투명 1.0 cm의 한 주기는 2.0 cm이므로 0.020 m를 입력해야 한다.
여기서 0.020 m의 마지막 0은 값을 바꾸는 0이 아니라 유효숫자를 나타내기 위해 남긴 것이다. 0.02 m와 0.020 m는 같은 길이지만, 0.020 m는 원래 길이를 2.0 cm처럼 소수 첫째 자리까지 맞추어 다루고 있다는 뜻을 함께 담고 있다.
센서가 직접 측정한 것은 속도나 가속도가 아니라 각 검은색 경계가 센서를 지나는 시각이다. 피켓펜스의 일정한 간격이 위치 정보가 되고, 시간 자료와 결합되면서 위치와 속도 자료를 만들 수 있다.
여기서 d는 검은색 테이프의 앞쪽 경계와 다음 검은색 테이프의 앞쪽 경계 사이 거리이다. 이 가이드의 권장 규격처럼 검은색 1.0 cm, 투명 1.0 cm로 만들었다면 d = 0.020 m이다. 만약 검은색 0.5 cm, 투명 0.5 cm로 만들었다면 d = 0.010 m로 바꿔야 한다. 구글 시트 물리 시트의 B2 값은 반드시 자신이 실제로 만든 피켓펜스 간격과 같아야 한다.
속도는 한 순간에 직접 측정한 값이 아니라, 두 경계 사이를 지나는 동안의 구간 평균속도로 계산한다. 따라서 그 속도를 어느 시각에 대응시킬지 정해야 한다. 가장 자연스러운 선택은 구간의 시작 시각과 끝 시각의 한가운데인 중간시간이다.
에너지 관점에서도 같은 이유로 v_i^2를 위치 하나에 대응시켜야 한다. 이때는 두 위치의 한가운데인 중간위치를 사용한다.
(0, 0)을 지나지 않을까요?t = 0은 피켓펜스를 손에서 놓은 순간이 아니라, 첫 검은색 칸이 포토게이트에 들어와 Arduino가 처음 기록한 순간이다. 따라서 그 순간 피켓펜스는 이미 아래로 움직이고 있으므로 초기속도 v0는 0이 아니다. 시간-위치 그래프가 (0, 0)에서 시작하는 것은 “정지 상태에서 출발했다”는 뜻이 아니라, 첫 기록 위치를 새 위치 기준점 x = 0으로 정했다는 뜻이다.
t = 0에서 양수 절편 v0를 갖고, 위치-속도제곱 그래프도 x = 0에서 양수 절편 v0²를 갖는 것이 자연스럽다.
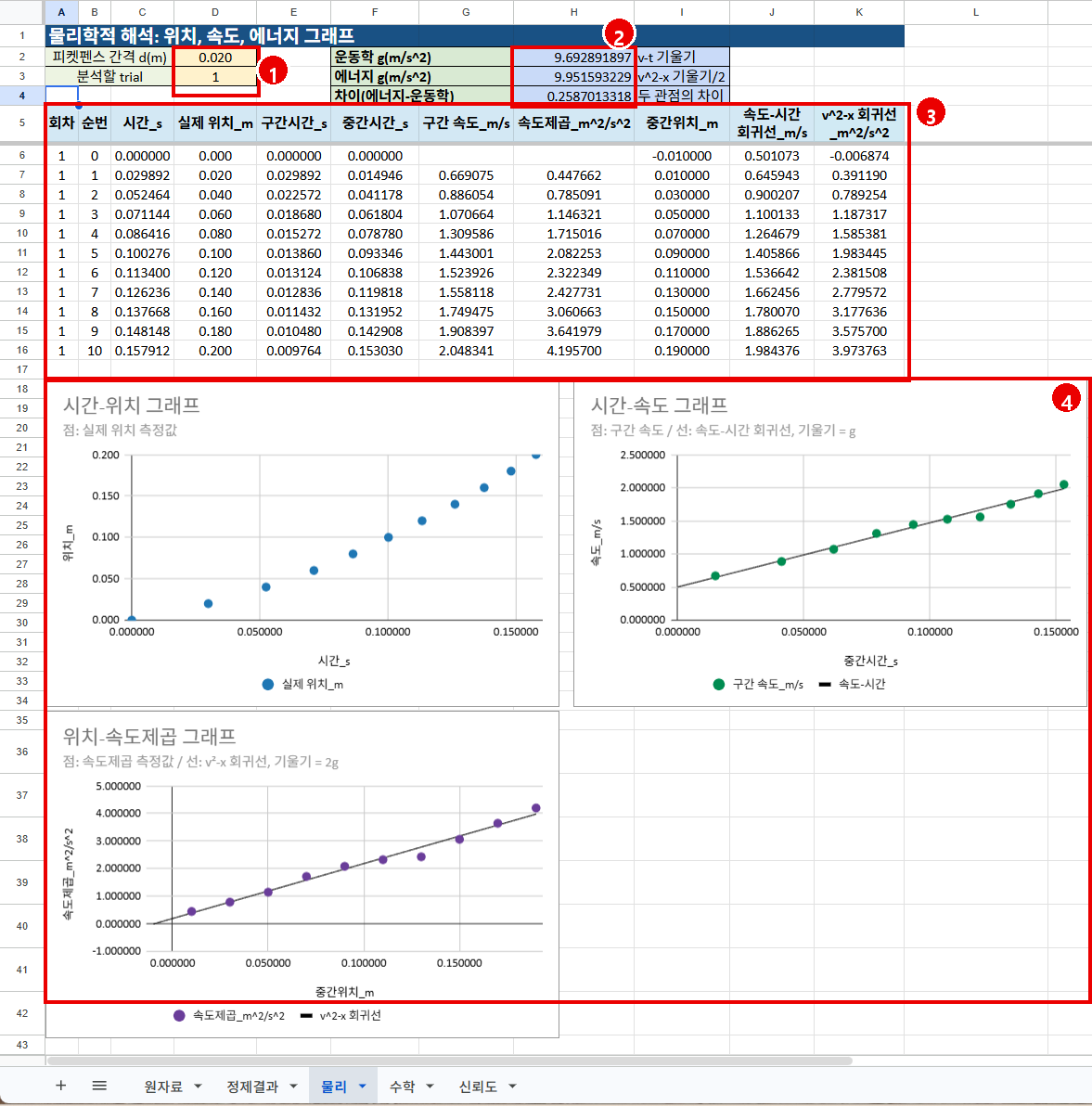
| 그래프 | 가로축 | 세로축 | 물리적 의미 |
|---|---|---|---|
| 시간-위치 그래프 | 시간_s | 실제 위치_m | 시간이 지날수록 피켓펜스가 얼마나 내려갔는지 확인한다. 점들이 직선보다 점점 가파른 곡선에 가까운지 본다. |
| 시간-속도 그래프 | 중간시간_s | 구간 속도_m/s | 속도가 시간에 따라 거의 일정하게 증가하는지 확인한다. 검정 회귀선의 기울기가 운동학 관점의 g이다. |
| 위치-속도제곱 그래프 | 중간위치_m | 속도제곱_m^2/s^2 | 낮아진 위치가 속도제곱 증가와 어떤 관계를 갖는지 확인한다. g이다. |
그래프를 읽을 때는 먼저 세 그래프가 낙하 운동의 특징을 잘 보이는지 확인한다. 그다음 시간-속도 그래프의 기울기에서 운동학 관점의 g를 읽고, 위치-속도제곱 그래프의 기울기를 2로 나누어 에너지 관점의 g를 구한다.
우리가 측정한 g는 만유인력만으로 정해지는 완벽한 값일까? 지구가 자전하고, 공기가 낙하를 방해한다면 그래프와 g값은 어떻게 달라질까?
특히 두 방법의 g가 다를 때는 “어느 쪽이 무조건 맞는가”보다, 속도 계산 방식과 피켓펜스 간격 오차가 두 그래프에 서로 다르게 반영된다는 점을 생각해 본다.
심화탐구에서 지구 자전과 공기저항 알아보기수학적 해석에서는 같은 시간-위치 자료를 여러 가지 함수로 설명해 본다. 자유낙하가 정말 등가속도 운동에 가깝다면, 시간-위치 그래프는 직선보다 곡선에 더 잘 맞아야 한다. 이 장에서는 실제 측정점, 1차식, 2차식을 비교하고, 왜 2차식이 더 알맞은지 그래프와 잔차로 판단한다.
수학 시트에서는 한 회차의 시간-위치 데이터를 두 가지 모델로 설명한다. 하나는 속도가 일정하다고 보는 1차식이고, 다른 하나는 가속도가 일정하다고 보는 2차식이다. 먼저 분석할 trial 번호와 피켓펜스 간격이 실제 실험 조건과 맞는지 확인한다.
왼쪽 표의 실제 위치는 센서가 기록한 시간과 피켓펜스 간격으로 만든 측정값이다. 예측값과 잔차는 두 모델이 실제 데이터를 얼마나 잘 설명하는지 판단하기 위한 값이다. 모든 숫자를 외우기보다, 잔차가 어느 모델에서 더 작고 0 주변에 고르게 모이는지 보는 것이 중요하다.
| 확인할 부분 | 무엇을 볼까? | 생각할 점 |
|---|---|---|
| 분석 조건 | trial 번호와 피켓펜스 간격이 맞는지 확인한다. | 조건이 틀리면 그래프 모양과 g값이 모두 달라진다. |
| 실제 위치 | 센서 시간과 피켓펜스 간격으로 만든 측정점이다. | 그래프에서 파란 점으로 나타나는 자료이다. |
| 1차 예측과 잔차 | 속도가 일정하다고 보았을 때의 예측값과 실제값의 차이이다. | 잔차가 규칙적으로 휘면 1차식이 자료를 충분히 설명하지 못한다. |
| 2차 예측과 잔차 | 가속도가 일정하다고 보았을 때의 예측값과 실제값의 차이이다. | 잔차가 더 작고 0 주변에 모이면 자유낙하 자료에 더 알맞다. |
| 회귀 요약 | 1차식과 2차식의 비교 결과, 2차식에서 얻은 g값을 확인한다. | 계산값만 보지 말고 그래프와 잔차를 함께 근거로 삼는다. |
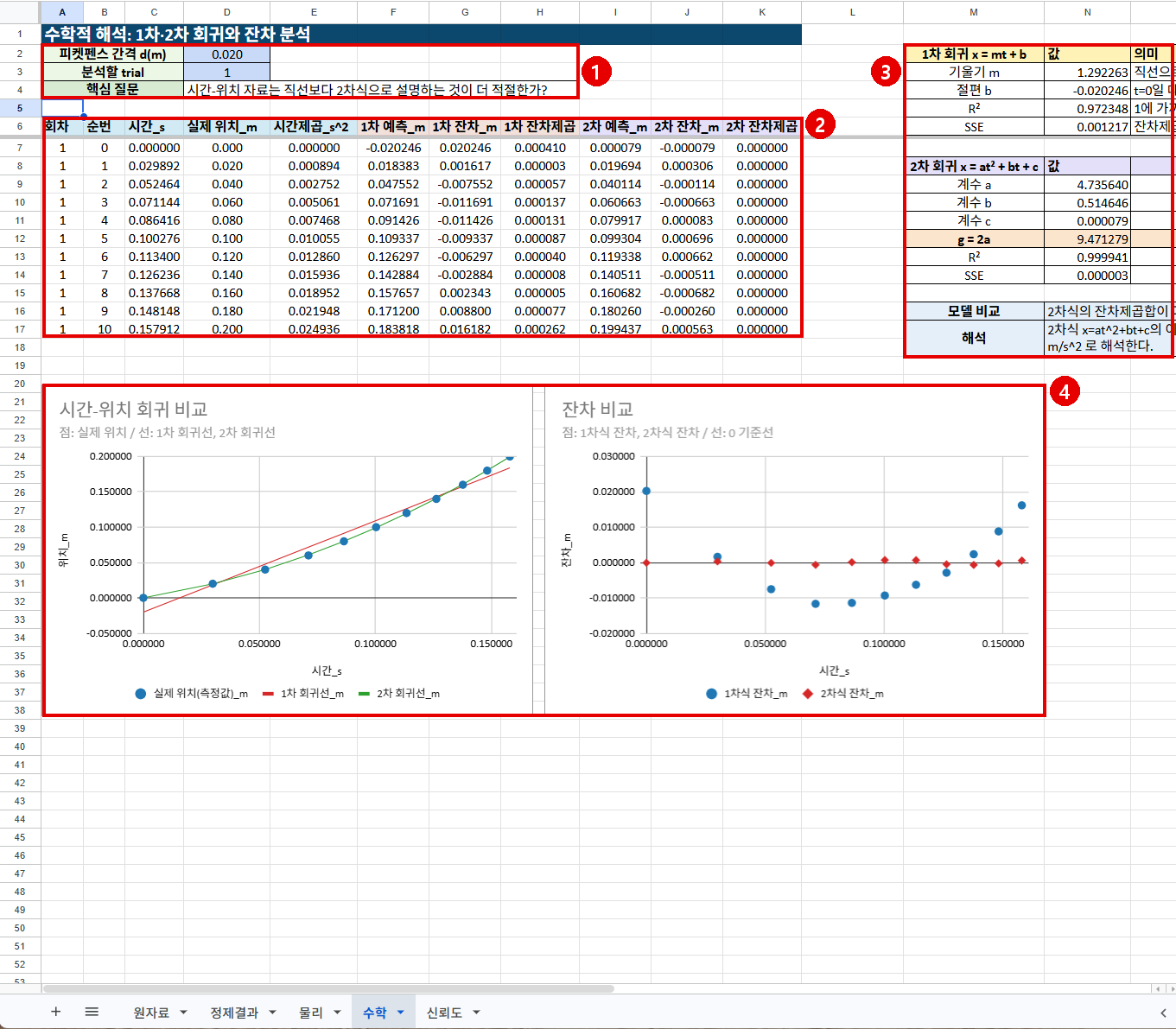
자유낙하에서는 위치가 시간에 정비례하지 않는다. 처음에는 느리게 이동하다가 점점 빠르게 이동하므로, 시간-위치 그래프는 직선보다 휘어진 곡선에 가깝다. 이를 확인하려면 같은 그래프에서 실제 위치 점, 1차 회귀선, 2차 회귀선을 함께 비교한다.
실제 위치(측정값)_m은 센서가 기록한 시간과 피켓펜스 간격으로 만든 실제 데이터이다.잔차 = 실제 위치 - 예측 위치를 계산한다.R²는 전체적으로 얼마나 잘 맞는지를 숫자 하나로 보여 주지만, 오차가 어떤 모양으로 남는지는 보여 주지 못한다. 잔차가 0 주변에 불규칙하게 흩어지면 모델이 자료의 경향을 잘 설명한 것이다. 반대로 잔차가 한쪽으로 휘거나 일정한 패턴을 보이면, R²가 커도 모델이 놓친 경향이나 실험 구조의 오차가 있을 수 있다.
그래프에서 “가장 잘 맞는 선”은 눈대중으로 정한 것일까? 스프레드시트는 어떤 기준으로 1차식과 2차식의 계수를 계산할까?
LINEST 함수는 어떤 계산을 대신 해 줄까?R²와 SSE는 왜 모델 비교에 쓰일까?시간-위치 자료를 2차식으로 근사하면 다음과 같이 쓸 수 있다.
이 식을 한 번 미분하면 속도 함수가 되고, 두 번 미분하면 가속도 함수가 된다.
자유낙하에서 가속도는 중력가속도이므로, 시간-위치 이차회귀식의 t² 계수가 a라면 g = 2a이다.
| 확인할 값 | 뜻 | 해석 |
|---|---|---|
2차식의 이차항 계수 a | 시간-위치 곡선이 얼마나 휘어 있는지 나타낸다. | 값이 클수록 같은 시간 동안 위치가 더 빠르게 증가한다. |
g = 2a | 위치 함수를 두 번 미분하면 가속도가 되기 때문이다. | 이 값이 수학적 해석에서 얻은 중력가속도이다. |
x(t)=at²+bt+c에서 왜 g=2a가 될까요?위치를 시간으로 한 번 미분하면 속도 v(t)=2at+b가 되고, 다시 한 번 미분하면 가속도 x''(t)=2a가 된다. 자유낙하에서 이 가속도를 중력가속도 g로 해석하므로 g=2a가 된다.
한 번의 실험값이 9.8 m/s²에 가까운지만 보는 것은 충분하지 않다. 같은 조건에서 여러 번 떨어뜨렸을 때 g 값들이 얼마나 비슷하게 나오는지 확인해야 실험의 신뢰도를 말할 수 있다. 이 장에서는 각 trial에서 얻은 g값을 비교하고, 어떤 값을 최종 평균에 사용할지 판단한 뒤 평균과 95% 신뢰구간을 해석한다.
신뢰도 분석에서는 각 trial에서 g값을 하나씩 얻은 뒤, 그 값들이 서로 얼마나 가까운지 확인한다. 같은 장치와 같은 방법으로 반복했다면 g값들은 비슷한 범위에 모여야 한다.
단, 데이터 개수가 너무 적은 trial은 대표값으로 쓰지 않는다. 예를 들어 피켓펜스가 센서를 한두 번만 지나간 trial은 전체 낙하 운동을 설명하기 어렵기 때문이다. 이런 trial은 평균 계산에서 제외하고, 제외한 이유를 기록한다.
한 번의 측정값은 우연히 실제값에 가깝거나 멀 수 있다. 여러 번 반복하면 값들이 어느 범위에 모이는지 볼 수 있고, 평균은 대표값을, 표준편차와 신뢰구간은 그 대표값의 불확실성을 알려 준다. 그래서 좋은 보고서는 평균 g뿐 아니라 반복값의 흩어짐도 함께 제시한다.
반복 측정값 중에는 센서 충돌, 경계 누락, 손으로 넣었다 뺐다 한 테스트 데이터처럼 다른 trial과 성격이 다른 값이 섞일 수 있다. 이런 값을 무조건 평균에 넣으면 평균이 한쪽으로 끌려간다.
신뢰도 시트는 기본 이상치 기준으로 IQR 기준을 사용한다. IQR은 가운데 50% 데이터의 폭이다.
g값이 이 하한보다 작거나 상한보다 크면 IQR 판정 열에 이상치로 표시된다. IQR 기준은 평균과 표준편차보다 극단값에 덜 흔들리므로, 표본 수가 10개 정도로 적을 때 쓰기 좋다.
z-score는 각 g값이 전체 평균에서 표준편차 몇 개만큼 떨어져 있는지 나타낸다.
보통 |z| ≥ 2이면 의심값, |z| ≥ 3이면 강한 이상치 후보로 본다. 하지만 표본이 적으면 평균과 표준편차 자체가 이상치의 영향을 크게 받으므로, 이 실험에서는 IQR 판정을 기본으로 사용하고 z-score는 참고값으로 본다.
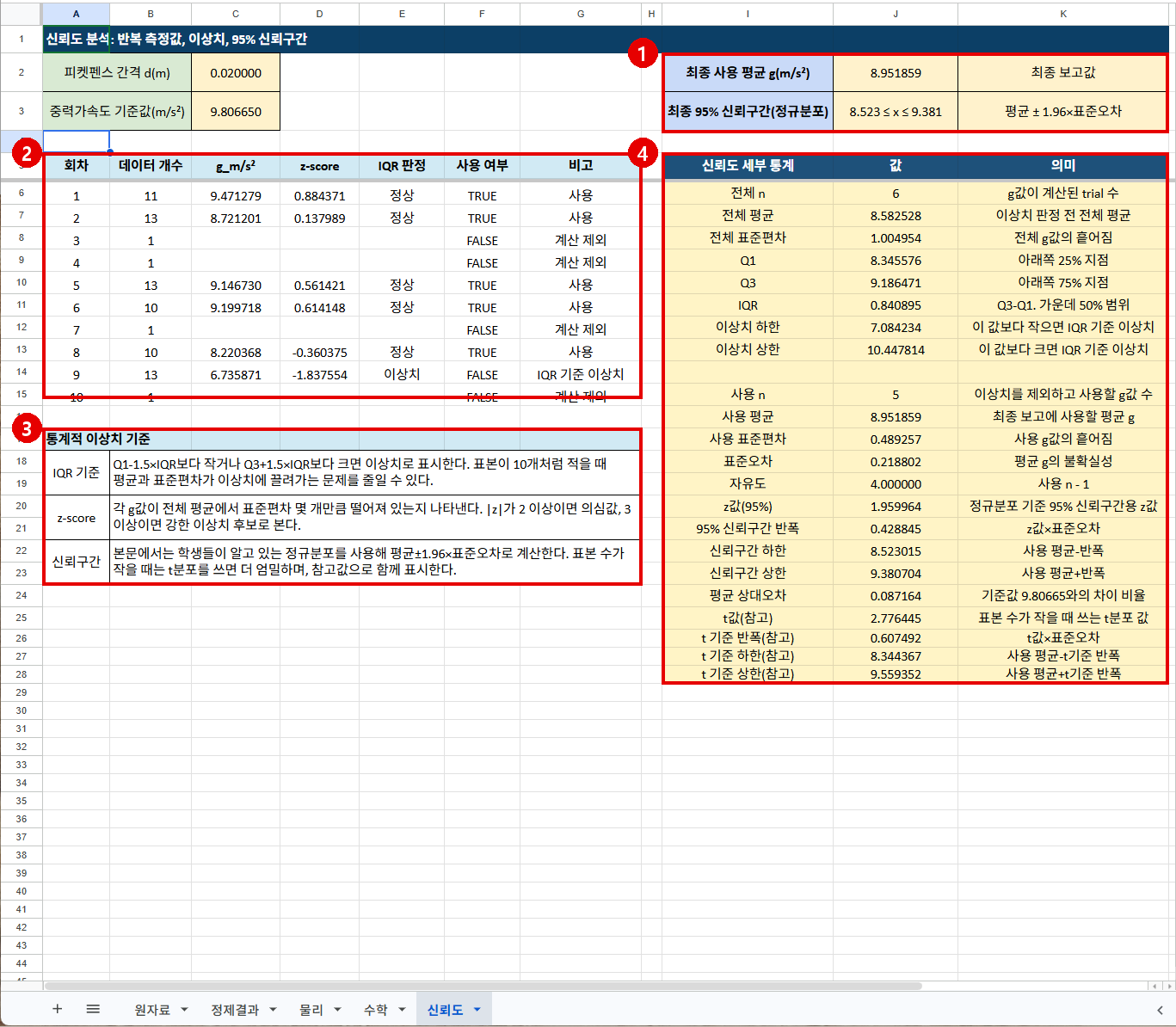
이상치를 제외하고 사용 여부가 TRUE인 값만 모아 평균을 낸다. 이 평균이 이 실험에서 얻은 중력가속도의 대표값이다.
| 통계량 | 의미 | 계산 방법 |
|---|---|---|
| 사용 n | 이상치와 데이터 부족 trial을 제외하고 실제 평균 계산에 사용한 g값 개수 | =COUNTIF(사용여부범위,TRUE) |
| 사용 평균 | 사용한 g값들의 대표값 | =AVERAGE(FILTER(g범위,사용여부범위=TRUE)) |
| 사용 표준편차 | 반복 측정값들이 평균 주변에 얼마나 흩어져 있는지 | =STDEV.S(FILTER(g범위,사용여부범위=TRUE)) |
| 표준오차 | 평균값 자체의 불확실성. 같은 실험을 다시 반복했을 때 평균이 얼마나 흔들릴지 나타낸다. | =표준편차/SQRT(사용 n) |
신뢰구간은 반복 측정으로 얻은 평균 g가 어느 범위에 있을지 추정하는 구간이다. 먼저 학생들이 이미 알고 있는 정규분포를 기준으로 계산한다. 정규분포에서 가운데 95%에 해당하는 범위는 평균에서 대략 ±1.96 표준오차만큼 떨어진 구간이다.
| 항목 | 뜻 | 계산 방법 |
|---|---|---|
| z값(95%) | 정규분포에서 95% 신뢰구간을 만들 때 사용하는 값 | =NORM.S.INV(0.975), 약 1.96 |
| 신뢰구간 반폭 | 평균에서 위아래로 더하고 빼는 폭 | z값 × 표준오차 |
| 신뢰구간 하한·상한 | 평균 g의 추정 범위 | 평균 ± 반폭 |
예시 자료에서는 이상치 제외 뒤 사용한 값이 5개이고, 최종 사용 평균은 I2:J2, 정규분포 기준 95% 신뢰구간은 I3:J3에 크게 표시된다. 이 예시의 신뢰구간은 약 8.523 ~ 9.381 m/s²이며, 보고서에는 “우리 조가 반복 측정으로 얻은 평균 g는 이 정도 범위에 있을 것으로 추정된다”처럼 쓴다.
반복 측정 횟수가 적을 때도 정규분포의 1.96을 그대로 써도 될까? 표본이 적으면 신뢰구간의 폭은 어떻게 달라질까?
이 실험의 오차는 단순히 “실수해서 생긴 오차”만이 아니다. 센서의 틈이 좁고, 피켓펜스가 실제로는 완벽한 직선 낙하를 하지 않으며, 시간 자료에서 속도와 가속도를 계산하는 과정 자체가 작은 오차를 키울 수 있다. 따라서 오차 분석에서는 실험 장치의 구조와 데이터 처리 과정을 함께 보아야 한다.
포토게이트 프레임의 빛길이 너무 좁거나 피켓펜스가 기울어지면 피켓펜스가 프레임 또는 LED 홀더에 닿을 수 있다. 이 충돌은 단순한 우연 오차가 아니라, 장치 구조 때문에 반복적으로 생기기 쉬운 오차이다. 피켓펜스가 장치에 닿으면 낙하 속도가 줄어들고, 그 결과 계산된 g는 실제값보다 작게 나오는 경향이 생긴다.
| 구조적 오차 원인 | 왜 문제가 되는가 | g값에 주는 영향 |
|---|---|---|
| 포토게이트 빛길이 좁음 | 피켓펜스가 프레임이나 LED 홀더와 부딪히거나 한쪽 면을 스치기 쉽다. | 마찰과 충돌로 속도가 줄어들어 g가 작게 추정되기 쉽다. |
| 피켓펜스가 회전함 | 센서를 지나는 경계가 비스듬해지고, 센서가 보는 유효 간격이 달라진다. | 어떤 구간은 실제보다 길거나 짧게 측정된 것처럼 보인다. |
| 테이프 간격이 완벽히 일정하지 않음 | 시트에서는 모든 간격을 같은 d로 계산하지만 실제 간격은 조금씩 다를 수 있다. | 위치값에 체계적 오차가 들어가며, 모든 그래프의 기울기가 영향을 받는다. |
| 검은 테이프 경계가 흐리거나 들뜸 | 센서가 빛이 막히는 순간을 항상 같은 기준으로 잡지 못한다. | 시간값이 앞뒤로 흔들리고, 속도 계산에서 더 크게 드러난다. |
| 공기저항 | 속도가 커질수록 운동을 방해하는 힘도 커진다. | 낙하 후반부 속도 증가가 작아져 g가 작게 추정될 수 있다. |
센서가 직접 기록하는 값은 위치나 속도가 아니라 시간이다. 위치는 피켓펜스 간격으로 정하지만, 속도는 두 시간값의 차이를 이용해 계산한다.
여기서 중요한 점은 Δt가 분모에 있다는 것이다. 센서 시간이 아주 조금만 흔들려도, 그 값이 분모에 들어가기 때문에 속도 오차가 커질 수 있다. 특히 낙하 후반부에는 피켓펜스가 빠르게 지나가므로 Δt가 작아진다. 분모가 작을수록 같은 시간 오차가 더 큰 속도 오차로 바뀐다.
예를 들어 어떤 구간 시간이 0.010 s인데 센서 판단이 0.0005 s만 흔들려도 상대 오차는 약 5%이다. 하지만 구간 시간이 0.050 s라면 같은 0.0005 s 오차는 약 1%에 불과하다. 그래서 빠르게 지나가는 후반부 데이터일수록 속도값이 더 민감하게 흔들릴 수 있다.
가속도는 속도가 시간에 따라 얼마나 변하는지를 다시 계산한 값이다. 즉 위치 자료에서 속도를 만들고, 속도 자료에서 다시 가속도를 만드는 과정은 수학적으로 미분에 가깝다. 미분은 자료의 전체적인 흐름보다 가까운 두 점 사이의 작은 차이를 크게 보기 때문에, 측정 노이즈가 증폭되기 쉽다.
| 그래프 | 정상적인 경향 | 오차가 의심되는 모습 | 가능한 원인 |
|---|---|---|---|
| 시간-위치 그래프 | 점들이 점점 가파르게 증가하는 곡선에 가깝다. | 중간에 위치 증가가 갑자기 둔해지거나 점 하나가 흐름에서 벗어난다. | 센서 충돌, 테이프 간격 불균일, 경계 누락 |
| 시간-속도 그래프 | 구간 속도 점들이 대체로 직선 주변에 놓인다. | 한두 구간 속도가 갑자기 튀거나 내려간다. | 시간차 Δt 오차 증폭, 피켓펜스 흔들림 |
| 위치-속도제곱 그래프 | 점들이 대체로 직선에 가깝다. | 몇몇 점이 직선에서 크게 벗어나거나, 시간-속도 그래프에서 구한 g와 차이가 크다. | 구간속도 계산 오차, 테이프 간격 불균일, 피켓펜스 회전, 센서 인식 시각의 흔들림 |
| 잔차 그래프 | 잔차가 0 주변에 비교적 작고 불규칙하게 흩어진다. | 잔차가 한쪽 방향으로 휘거나 일정한 패턴을 보인다. | 모델이 실제 운동을 충분히 설명하지 못함, 구조적 오차 |
| 개선할 부분 | 구체적인 방법 | 기대되는 효과 |
|---|---|---|
| 포토게이트 통과 폭 확보 | 피켓펜스가 포토게이트의 LED 홀더나 프레임에 닿지 않고 지나갈 수 있도록 빛길의 폭을 충분히 확보한다. 떨어뜨릴 때는 피켓펜스가 기울거나 회전하지 않도록 손을 곧게 놓는다. | 피켓펜스가 장치에 닿아 생기는 마찰과 충돌을 줄인다. |
| 피켓펜스 제작 정밀도 | 각 칸을 하나씩 재기보다 여러 칸의 전체 길이를 재고 평균 간격을 사용한다. | 테이프 간격 오차가 평균화된다. |
| 센서 신호 안정화 | 검은색 테이프를 빛이 통과하지 않게 붙이고, 들뜬 부분을 눌러 경계를 선명하게 만든다. | 경계 인식 시각의 흔들림이 줄어든다. |
| 데이터 처리 | 각 구간 가속도를 직접 믿기보다 그래프와 회귀선을 이용하고, 명백히 충돌한 trial은 별도로 표시한다. | 미분 과정에서 증폭된 오차의 영향을 줄인다. |
| 반복 측정 | 같은 조건에서 여러 번 측정하고 평균과 신뢰구간을 함께 제시한다. | 우연 오차의 영향을 줄이고 결과의 신뢰도를 판단할 수 있다. |
구간시간_μs가 대체로 줄어드는 모습을 보인다. 아래로 갈수록 속도가 커지기 때문이다. 다만 구간시간_μs가 줄어드는 전체 경향이 있어도, 특정 구간이 갑자기 커지거나 작아지면 그 지점의 센서 인식이나 충돌 여부를 함께 의심해야 한다.속도는 위치의 차이를 시간 차이로 나누어 만든 값이고, 가속도는 다시 속도의 변화를 이용해 만든 값이다. 이렇게 차이를 반복해서 계산하면 전체 흐름보다 가까운 두 점 사이의 작은 흔들림에 더 민감해진다. 그래서 원래 위치 자료에서는 작아 보이던 센서 시간 오차나 경계 인식 오차가 속도 자료, 가속도 자료에서는 더 크게 튀어 보일 수 있다.
이 장은 앞 장에서 던진 질문을 원래 학습 순서대로 더 깊게 다룬다. 먼저 8장의 물리학적 해석에서 나온 지구 자전과 공기저항을 살펴보고, 그다음 9장의 수학적 해석에서 나온 최소제곱법과 LINEST, 마지막으로 10장의 신뢰도 분석에서 나온 t분포를 다룬다.
8장에서는 지표면 근처에서 g가 거의 일정하고, 공기저항이 작다고 가정했다. 이 가정은 교실 실험을 이해하기에는 충분하지만, 더 엄밀하게 보면 우리가 측정하는 g에는 지구의 자전, 지구의 모양, 공기저항 같은 요인이 함께 들어간다.
만유인력만 생각하면 지구가 물체를 지구 중심 방향으로 끌어당긴다. 그런데 우리는 지구와 함께 하루에 한 바퀴씩 회전하고 있다. 회전하는 관찰자 입장에서는 바깥쪽으로 밀려나는 효과가 생기며, 이 효과가 중력을 조금 상쇄한다. 그래서 실제로 측정되는 유효 중력가속도는 순수한 만유인력으로 계산한 값보다 아주 조금 작다.
| 기호 | 뜻 | 해석 |
|---|---|---|
GM/R² | 만유인력에 의한 중력가속도 | 지구가 물체를 끌어당기는 효과이다. |
ω²R cos²φ | 자전에 의한 감소 효과 | 지구와 함께 회전하기 때문에 측정되는 g가 조금 작아지는 효과이다. |
φ | 위도 | 적도에서 효과가 가장 크고, 극지방에서는 거의 없다. |
우리나라 위도에서는 자전에 의한 차이가 대략 0.02 m/s² 정도 수준이다. 이는 정밀한 중력 측정에서는 의미가 있지만, 이번 실험에서 가장 큰 오차 원인인 센서 충돌, 피켓펜스 회전, 테이프 간격 오차에 비하면 훨씬 작은 편이다.
공기저항은 항상 운동 방향의 반대쪽으로 작용한다. 피켓펜스가 아래로 떨어질 때 공기저항은 위쪽으로 작용하므로, 실제 알짜힘은 중력보다 작아진다.
공기저항 F_D는 보통 속도가 커질수록 커진다. 따라서 낙하 초반보다 후반에 더 큰 영향을 주며, 실제 속도 증가가 이상적인 등가속도 운동보다 조금 둔해진다.
| 그래프 | 공기저항이 작을 때 | 공기저항이 커지면 |
|---|---|---|
| 시간-속도 그래프 | 속도 점들이 거의 직선 위에 놓인다. | 공기저항이 충분히 크면 후반부 속도 증가가 이론값보다 작아질 수 있다. |
| 위치-속도제곱 그래프 | v²-x 관계가 거의 직선이다. | 공기저항이 충분히 크면 직선 관계에서 벗어나는 경향이 나타날 수 있다. |
| 계산된 g | 실제 중력가속도에 가까워진다. | 속도 증가가 작아져 g가 작게 추정될 수 있다. |
다만 이번 장치와 실제 데이터에서는 공기저항 때문에 생기는 뚜렷한 후반부 휘어짐이 보이지 않을 수 있다. 따라서 공기저항을 억지로 찾기보다, 운동학 관점과 에너지 관점의 g가 왜 달라졌는지, 피켓펜스 간격 오차나 구간속도 계산 오차가 어떤 영향을 주는지 함께 생각하는 편이 더 적절하다.
운동학 관점은 시간-속도 그래프의 기울기를 사용하고, 에너지 관점은 위치-속도제곱 그래프의 기울기를 사용한다. 두 그래프에 들어가는 속도는 센서가 직접 측정한 값이 아니라, 피켓펜스 간격 d를 구간시간 Δt로 나누어 계산한 구간 평균속도이다.
| 원인 | 왜 두 g값을 다르게 만들 수 있는가 |
|---|---|
| 피켓펜스 간격 오차 | 실제 간격이 시트에 입력한 d와 다르면 위치와 속도가 함께 달라진다. 이 오차는 두 방법 모두에 영향을 주지만, 그래프 축과 회귀 방식이 달라 완전히 같은 크기로 반영되지는 않는다. |
| 구간 평균속도 사용 | 에너지 식은 한 순간의 속도와 위치를 연결하지만, 실험에서는 한 구간의 평균속도를 사용한다. 이 속도를 어느 위치에 대응시킬지 정하는 과정에서 근사가 들어간다. |
| 속도제곱의 민감도 | 에너지 관점에서는 속도를 제곱하므로, 속도 계산의 작은 흔들림이 v²에서는 더 크게 나타난다. 그래서 특정 구간의 시간 오차가 에너지 g에 더 강하게 반영될 수 있다. |
| 센서 인식 시각의 흔들림 | 검은색 경계를 감지하는 시각이 조금 앞뒤로 흔들리면 Δt가 달라지고, 그 결과 속도와 속도제곱이 모두 변한다. |
따라서 에너지 관점의 g가 기준값에 더 가깝게 나왔다고 해서 에너지 방법이 항상 더 정확하다고 말할 수는 없다. 이번 데이터에서는 두 방법이 서로 다른 방식으로 오차를 반영했고, 그중 하나가 기준값에 더 가까웠다고 해석하는 것이 안전하다.
LINEST 함수는 어떤 계산을 대신 해 줄까?R²와 SSE는 왜 모델 비교에 쓰일까?실험점들은 완벽한 직선이나 곡선 위에 놓이지 않는다. 회귀분석은 여러 가능한 식 중에서 실제 점들과 가장 잘 맞는 식을 찾는 과정이다. 먼저 개념을 단순하게 보기 위해, 같은 자료를 두 개의 1차식으로 각각 근사해 보자.
잔차는 실제값에서 예측값을 뺀 값이다. 잔차를 그냥 더하면 양수와 음수가 서로 상쇄될 수 있으므로, 최소제곱법은 잔차를 제곱해서 더한다. 이렇게 더한 값을 잔차제곱합, 즉 SSE라고 한다.
아래 예시에서는 두 후보 함수가 있다. 둘 다 1차식이지만 기울기와 절편이 다르다.
같은 실제 자료에 대해 두 함수의 예측값을 각각 계산하고, 실제값과 예측값의 차이를 제곱한다. 그 제곱값을 모두 더했을 때 더 작은 함수가 실제 점들을 더 정확히 근사한 함수이다.
| 시간 t | 실제값 y | 후보 A 예측 | A 잔차제곱 | 후보 B 예측 | B 잔차제곱 |
|---|---|---|---|---|---|
| 0 | 0.2 | 0.1 | 0.01 | 0.2 | 0.00 |
| 1 | 1.1 | 1.1 | 0.00 | 1.0 | 0.01 |
| 2 | 2.2 | 2.1 | 0.01 | 1.8 | 0.16 |
| 3 | 3.0 | 3.1 | 0.01 | 2.6 | 0.16 |
| SSE | 0.03 | 0.33 |
후보 A의 잔차제곱합은 0.03이고, 후보 B의 잔차제곱합은 0.33이다. 따라서 이 자료에서는 후보 A가 후보 B보다 실제값을 더 정확히 근사한다고 판단할 수 있다. 최소제곱법은 이 생각을 확장해서, 가능한 여러 함수 중 SSE가 가장 작아지는 함수를 찾는 방법이다.
Google Sheets의 LINEST 함수는 최소제곱법 계산을 대신 해 준다. 기본 구조는 다음과 같다.
| 분석 | 회귀식 | 시트에서의 의미 |
|---|---|---|
| 1차 회귀 | x = mt + b | LINEST로 기울기 m, 절편 b, R²를 함께 구한다. SLOPE, INTERCEPT로도 같은 1차 회귀를 계산할 수 있지만, 이 양식에서는 2차 회귀와 같은 방식으로 읽기 위해 LINEST를 사용한다. |
| 2차 회귀 | x = at² + bt + c | t와 t²를 두 개의 입력 열로 넣어 a, b, c를 한 번에 구한다. |
2차식은 곡선이지만, LINEST 입장에서는 다음과 같은 형태의 다중 회귀로 처리된다.
즉 t²와 t를 서로 다른 두 입력값처럼 넣고, 실제 위치 x를 가장 잘 예측하는 계수를 찾는다. Google Sheets에서는 여러 입력 열을 넣을 때 계수의 반환 순서가 헷갈릴 수 있으므로, 양식에 들어 있는 공식을 그대로 사용하는 것이 안전하다.
| 항목 | 뜻 | 해석 방법 |
|---|---|---|
R² | 결정계수. 회귀식이 실제 데이터의 변화를 얼마나 잘 설명하는지 나타낸다. | 1에 가까울수록 설명력이 크다. 다만 R²가 높다고 해서 실험 오차가 없다는 뜻은 아니다. |
SSE | 잔차제곱합. 모든 잔차를 제곱해서 더한 값이다. | 같은 데이터에서 두 모델을 비교할 때 작을수록 실제 점에 더 가깝게 맞은 것이다. |
잔차 그래프 | 각 점의 잔차를 시간에 따라 그린 그래프이다. | 좋은 모델이라면 잔차가 0 기준선 주변에 작고 불규칙하게 흩어진다. 한쪽으로 휘는 패턴이 보이면 모델이 자료의 모양을 놓치고 있는 것이다. |
R²는 “이 모델이 실제 데이터의 변화를 얼마나 설명했는가”를 나타내는 값이다. 계산할 때는 먼저 실제값들이 평균에서 얼마나 흩어져 있는지, 즉 전체 변동을 구한다. 그다음 회귀식으로 설명하지 못하고 남은 잔차제곱합을 비교한다.
만약 회귀식의 예측값이 실제값과 거의 같다면 SSE가 매우 작아지고, R²는 1에 가까워진다. 반대로 회귀식이 평균값으로 대충 예측하는 것과 별 차이가 없다면 SSE가 SST와 비슷해지고, R²는 0에 가까워진다.
R²와 SSE는 서로 보완해서 본다. 2차식의 R²가 1에 더 가깝고 SSE가 더 작으며, 잔차 그래프도 0 주변에 더 작게 모이면 시간-위치 자료에는 1차식보다 2차식이 더 적절하다고 말할 수 있다.9장에서는 수학 시트의 그래프를 보고 1차식과 2차식을 비교했다. 여기서는 그 화면의 오른쪽 요약표가 어떤 계산을 담고 있는지 확인한다. 아래 그림에서 ③ 영역이 회귀식의 계수, g = 2a, R², SSE를 모아 놓은 부분이다.
흐름은 다음과 같다. 먼저 선택한 trial의 시간-위치 자료를 가져온다. 그다음 1차식과 2차식이 각각 예측한 위치를 계산한다. 실제 위치에서 예측 위치를 빼면 잔차가 되고, 잔차를 제곱해서 더하면 SSE가 된다. LINEST는 이 과정을 통해 SSE가 작아지도록 회귀식의 계수를 찾는다.
| 셀 | 공식 예시 | 의미 |
|---|---|---|
| O9 | =INDEX(LINEST(위치범위,{시간범위,시간제곱범위},TRUE,TRUE),1,1) | 2차식 x = at² + bt + c에서 이차항 계수 a를 가져온다. |
| O12 | =2*O9 | 이계도함수 x''(t)=2a를 이용해 g를 구한다. |
| O13 | =INDEX(LINEST(...),3,1) | 2차식이 자료를 얼마나 잘 설명하는지 나타내는 결정계수 R²이다. |
| O14 | =SUM(2차잔차제곱범위) | 2차식의 잔차제곱합이다. 1차식의 잔차제곱합과 비교한다. |
반복 측정 횟수가 적을 때도 정규분포의 1.96을 그대로 써도 될까? 표본이 적으면 신뢰구간의 폭은 어떻게 달라질까?
10장에서는 학생들이 이미 알고 있는 정규분포를 기준으로 95% 신뢰구간을 계산했다. 하지만 실제 실험에서는 사용 가능한 trial이 5개나 8개처럼 적을 수 있다. 이때는 표준편차 s 자체도 불안정하게 추정되므로, 정규분포보다 조금 더 넓은 신뢰구간을 잡는 t분포가 더 엄밀하다.
정규분포 기준 95% 신뢰구간은 평균에서 1.96 × 표준오차만큼 위아래로 떨어진 범위를 사용한다. t분포에서는 1.96 대신 표본 수에 따라 달라지는 t값을 사용한다.
| 항목 | 뜻 | 구글 스프레드시트 예시 |
|---|---|---|
| 자유도 | 표준편차를 추정할 때 독립적으로 변할 수 있는 값의 개수이다. 표본 평균을 이미 사용했으므로 보통 n-1을 쓴다. | =사용n-1 |
| t값 | 표본이 적을 때 신뢰구간을 넓히기 위해 사용하는 값이다. n이 커질수록 1.96에 가까워진다. | =T.INV.2T(0.05, 자유도) |
| t분포 신뢰구간 반폭 | t값을 사용해 계산한 평균의 불확실성이다. | =t값*표준오차 |
자유도가 n-1인 이유는 평균을 먼저 계산했기 때문이다. 예를 들어 g값 5개가 있고 그 평균이 이미 정해져 있다고 하자. 이때 앞의 4개 값은 어느 정도 자유롭게 달라질 수 있지만, 평균을 그대로 유지하려면 마지막 1개 값은 자동으로 정해진다. 즉 5개 값이 모두 독립적으로 움직일 수 있는 것이 아니라, 평균이라는 조건 하나를 이미 사용했기 때문에 독립적으로 남는 정보는 5-1=4개이다.
표준편차는 각 값이 평균에서 얼마나 떨어져 있는지로 계산한다. 그런데 그 평균도 같은 표본에서 구했기 때문에, 표준편차를 계산할 때는 평균을 정하는 데 정보 하나를 이미 쓴 것으로 본다. 그래서 표본 표준편차와 t분포에서는 자유도를 n이 아니라 n-1로 둔다.
예를 들어 사용한 trial이 n = 5개이면 자유도는 4이고, 95% 신뢰구간의 t값은 약 2.776이다. 정규분포의 1.96보다 크기 때문에 신뢰구간도 더 넓어진다. 이전 예시 데이터에서는 정규분포 기준 반폭이 약 0.429였지만, t분포 기준 반폭은 약 0.607로 커진다.
아래 질문은 기본 보고서를 마친 뒤 추가 탐구 주제로 사용할 수 있다. 새 실험을 설계하거나, 이미 얻은 데이터를 다른 방식으로 다시 분석해 보면서 답을 찾는다.
| 확장 질문 | 탐구 방법 | 생각할 점 |
|---|---|---|
| 피켓펜스 간격을 1.0 cm, 2.0 cm, 3.0 cm로 바꾸면 g값의 평균과 흩어짐은 어떻게 달라질까? | 간격이 다른 피켓펜스를 각각 만들어 같은 방식으로 10회씩 측정한다. | 간격이 너무 짧으면 센서가 놓칠 수 있고, 너무 길면 데이터 점 수가 줄어든다. |
| 포토게이트 통과 공간을 더 넓히거나 피켓펜스를 더 단단하게 만들면 시간-속도 그래프의 기울기는 실제값에 가까워질까? | 프레임과의 접촉이 거의 없는 경우와 접촉이 자주 생기는 경우의 그래프를 비교한다. | 접촉과 흔들림을 줄이는 것이 평균 g뿐 아니라 표준편차와 잔차 모양도 개선하는지 본다. |
| 시간-속도 그래프에서 앞부분만 사용한 g와 전체 데이터를 사용한 g는 어떻게 다를까? | 초반부 점만 선택한 회귀선과 전체 점 회귀선을 비교한다. | 후반부에 공기저항, 충돌, 센서 누락이 커진다면 두 값이 달라질 수 있다. |
| 1차식, 2차식, 3차식 중 가장 R²가 큰 모델을 고르면 항상 좋은 해석일까? | 같은 시간-위치 자료에 여러 차수의 회귀식을 적용하고 잔차와 물리적 의미를 비교한다. | 차수가 높으면 점에는 잘 맞을 수 있지만, 자유낙하의 물리 법칙과 맞지 않는 과적합이 생길 수 있다. |
| 검은색 테이프의 폭과 투명 구간의 폭이 서로 다르면 센서가 기록하는 위치 간격을 어떻게 정해야 할까? | 경계의 종류를 정하고, 같은 종류의 경계 사이 거리를 실제로 재서 분석한다. | 분석에서 쓰는 d는 “센서가 반복해서 기록하는 같은 기준점 사이 거리”여야 한다. |
| 단진자를 이용해 구한 중력가속도는 포토게이트로 구한 값과 얼마나 비슷할까? | 실의 길이 L과 작은 진폭에서의 주기 T를 측정하고, g = 4π²L/T²로 계산한다. | 자유낙하 실험은 짧은 시간의 위치 변화를 분석하고, 단진자 실험은 여러 번 왕복하는 주기를 이용한다. 두 방법의 오차 원인이 어떻게 다른지 비교한다. |